
Real-time Self-localization using Model-based Matching for Autonomous Robot of RoboCup MSL
- DOI
- 10.2991/jrnal.k.200528.005How to use a DOI?
- Keywords
- Self-localization; RoboCup middle size league; soccer robot; genetic algorithm
- Abstract
This paper presents a self-localization technique using an omni-directional camera for an autonomous soccer robot. The position information of the robot is important for strategic behavior and cooperative operation. Therefore, we have proposed the self-localization method which generates the searching space based on a model-based matching with white line information of soccer field, and which recognizes the robot position by optimizing the fitness function using genetic algorithm.
- Copyright
- © 2020 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
The main focus of the RoboCup competitions is the game of football/soccer, where the research goals concern cooperative multi-robot and multi-agent systems in dynamic adversarial environments [1]. In the field of RoboCup, self-localization technique is important to estimate own position including goal and other robot positions and to decide strategy. Basically, we estimate the self-position with the image information, the environment information and the field information. In this paper, we describe a real-time self-localization method that applies a genetic algorithm (GA) for the RoboCup middle size league (MSL, Figure 1), which has the widest field size (12 × 18 m). In Section 2 is hardware structure, which is overview of our past robot, driving module, ball handling module and kicking module. In Section 3, vision systems, which are omni-directional camera module and self-localization method are described. And we verify the effectiveness of the proposed self-localization method using GA in Section 4.

RoboCup MSL.
2. HARDWARE STRUCTURE
We have restructured the most part of hardware structure every year since our team was founded in 2008. We developed the robot based on recent MSL concepts that are high torque driving module, ball handling module, electrical kicking module using solenoid and USB3.0 camera system. We have called the platform as “Mugen” series [2], and “Mugen III (M-III)” shown in Figure 2, which is improved and based on “Mugen” model, participated in RoboCup Japan Open 2017.
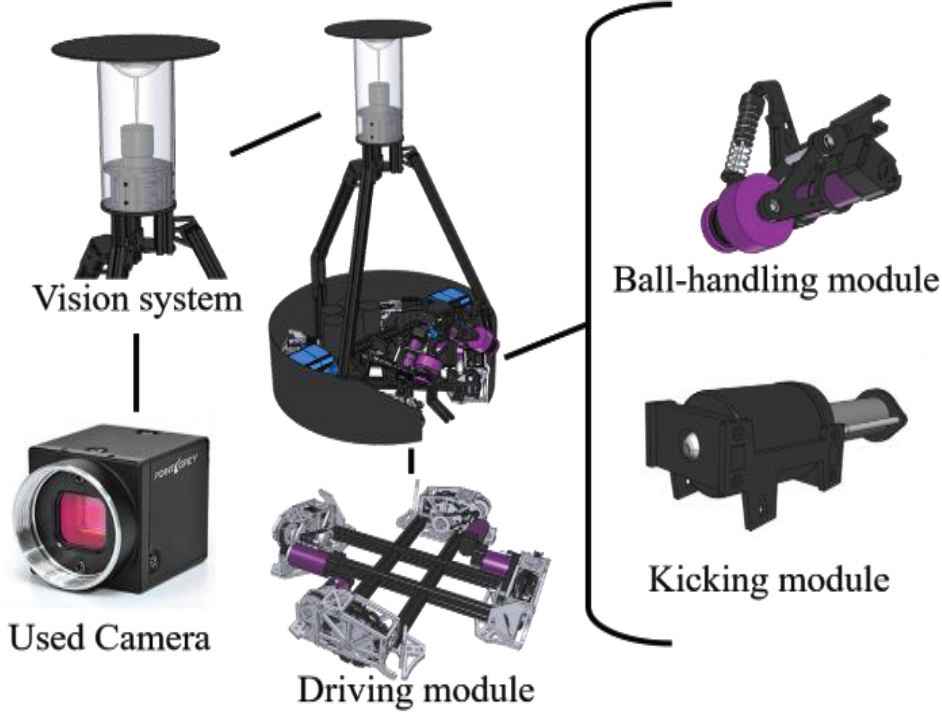
“Mugen III’ mechanical layout.
This high torque driving module equips 4-wheels and each wheel is omni-directional wheel. We use ball handling module for rotating a ball with natural direction. This kicking module can shoot a ball by solenoid.
3. VISION SYSTEM
3.1. Hardware of Vision System
The omni-directional vision system of our robot is consisted of the camera (FLIR® Systems, Inc. Flea3 [3]), a varifocal lens (Vstone) and a hyperboloidal mirror (Vstone). We developed vision system shown in Figure 2 for RoboCup MSL robot by combining with above elements. The image captured by this vision system is shown in Figure 3a, and the image size and frame rate are 512 × 512 (pixels) and 30 (fps) respectively.
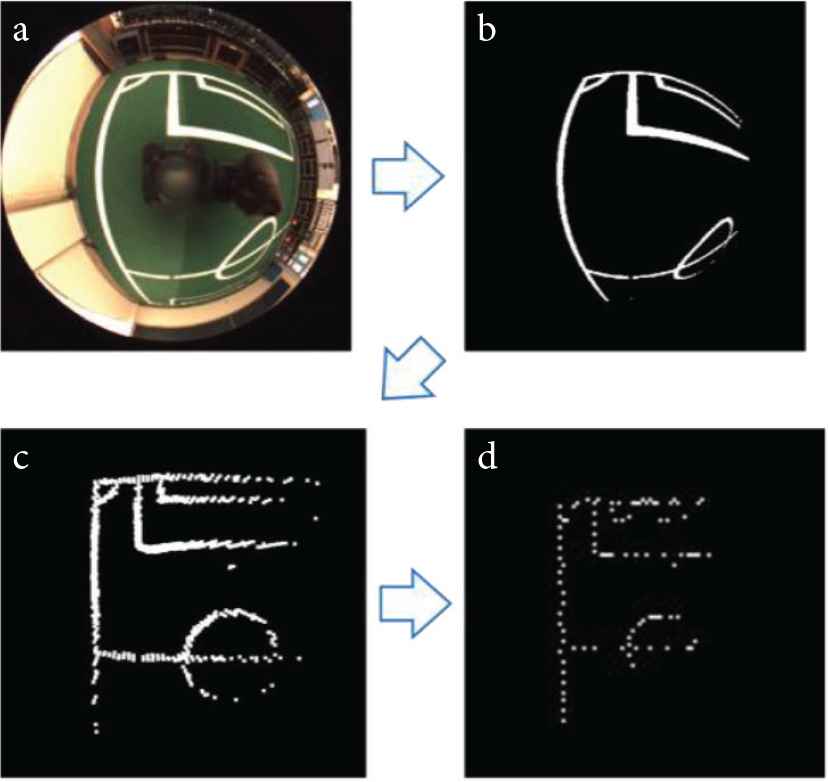
Process of making search model. (a) Original image from camera. (b) White detection image. (c) Orthogonalized image. (d) Search model.
3.2. Self-localization
We use a white line of MSL field for self-localization. We have proposed the self-localization method which generates the searching space based on a model-based matching using white line information, and which recognizes the robot position by optimizing the fitness function which has the correct robot position as the maximum value of the function. And this proposed self-localization method uses Genetic Algorithm (GA) [4] for optimization of the fitness function.
3.2.1. Searching model
Figure 3 shows the process of making the searching model of the proposed method. At first, we need the detection image of the white line for making the searching model based on the white line. We obtain the white detection image by employing the converting method of color space from RGB to HSV and to YUV like Figure 3b. And we generate the field information by orthogonalizing the white line information like Figure 3c. Moreover, we determine the searching model by thinning down the field information based on white line like Figure 3d. Therefore we use thinned model as searching model for the self-localization.
3.2.2. Model-based matching
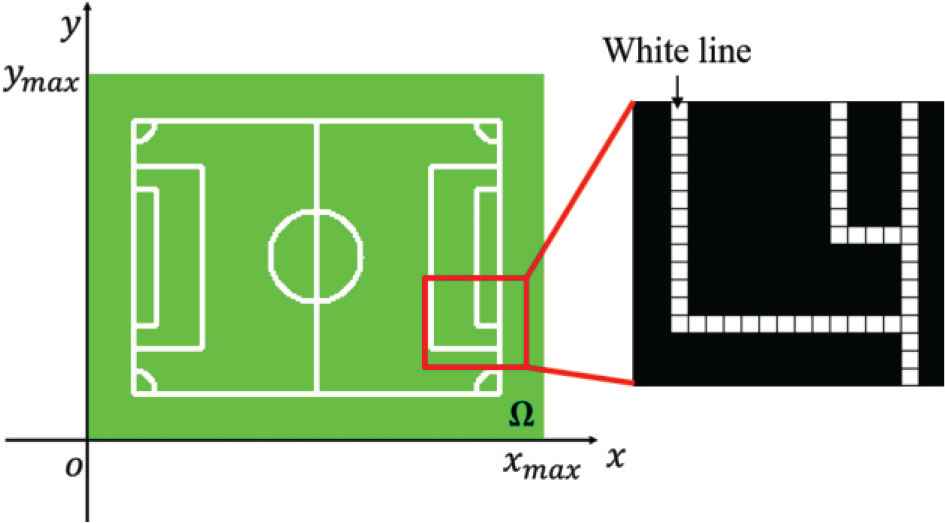
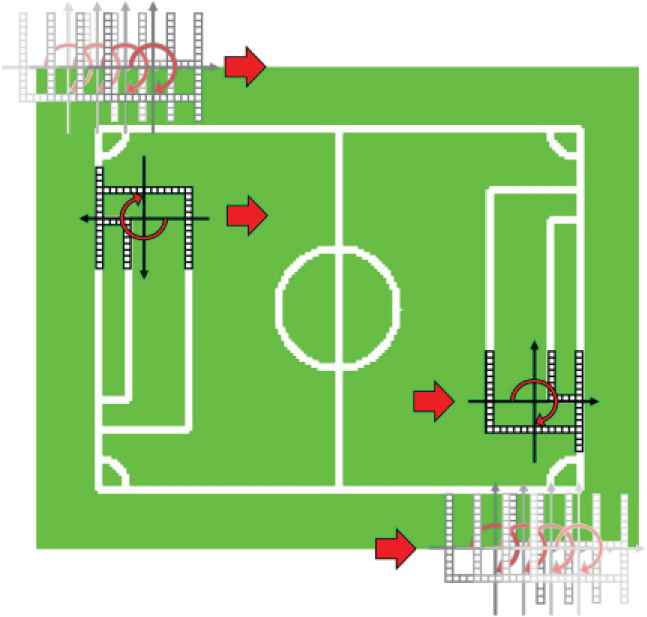
The proposed self-localization method generates the searching space by model-based matching between geometric information of the white line in the MSL field and above-mentioned searching model. Here, the matching area Ω is MSL field, and white line in the field is expressed as set of pixels like Figure 4. Therefore, the matching area Ω is defined by following Equation (1).
Matching area.
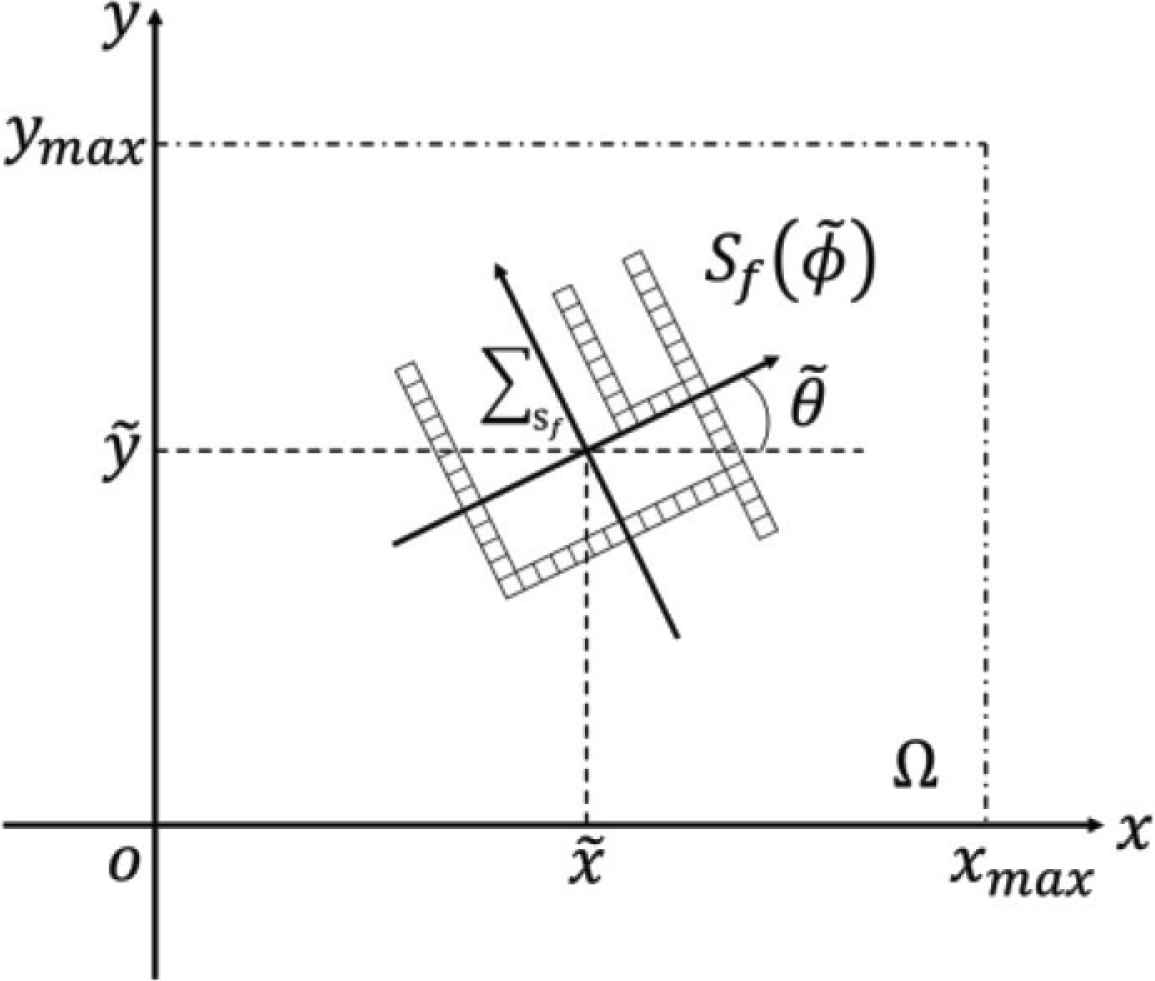
Moving model.
The movement of the moving model Sf in the matching area is expressed as
The fitness function
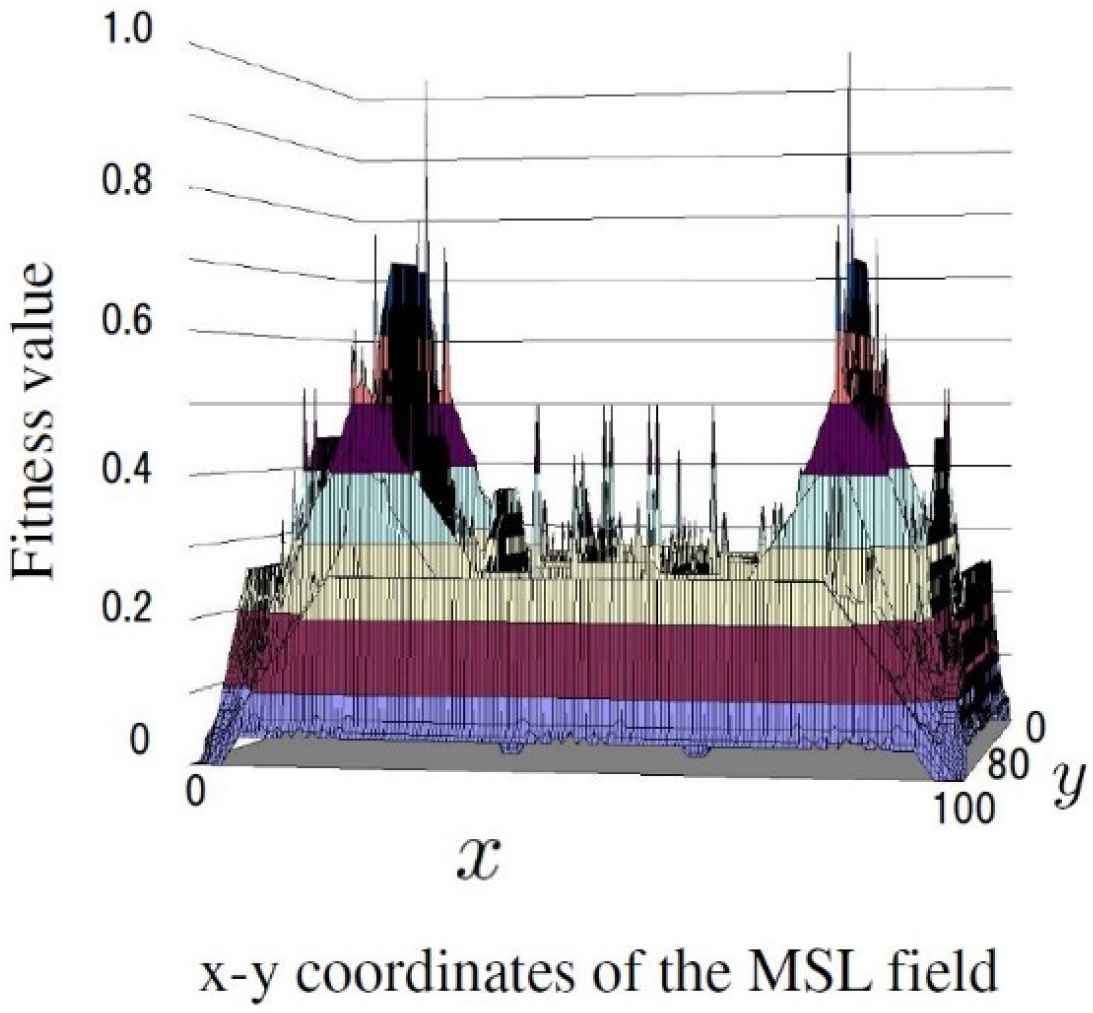
The calculation result of whole matching area shown in Figure 6 shows Figure 7. In this Figure 7, the vertical axis represents the fitness value, and the horizontal axes represent the field plane. Here, we select only one depending on the value of an electric compass, because two maximum value exist in the function value caused by revolution symmetry of geometric characters of the MSL field.
Model matching.
Calculation result of the fitness function.
3.2.3. Verification of model-based matching
We performed an experiment to verify the effectiveness of the proposed model-based matching. Figure 8 shows the error between the correct position and the detected position in the quarter area of the MSL field at an interval of 1 m. The severity of the error amount is indicated by the brightness of the gray scale. The average error was 12.7 (cm), so the self-localization method is accurate enough for playing soccer.
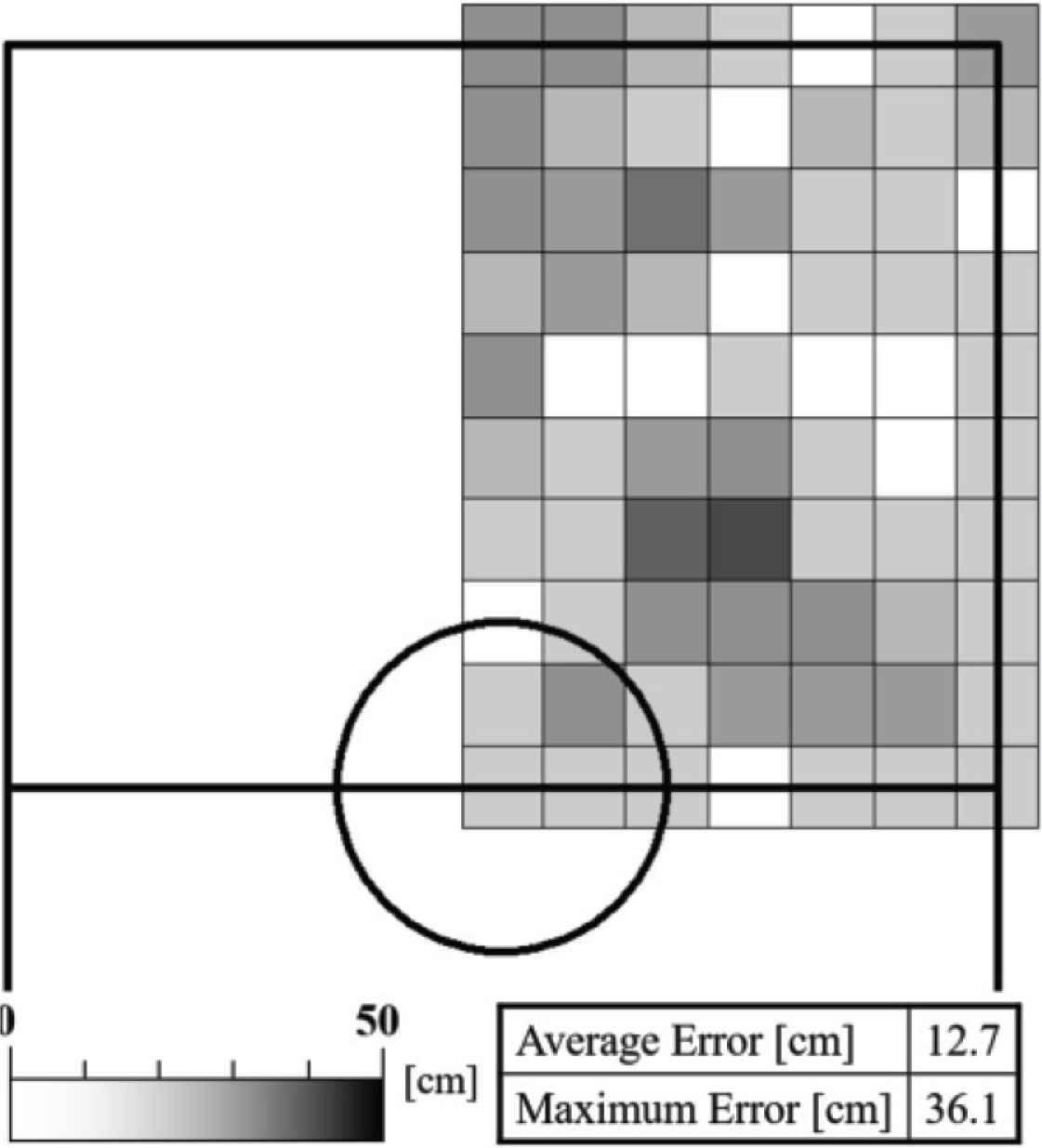
Error of the self-localization using whole searching.
However, the processing time of whole searching for matching area Ω is 3000 (ms). So, we have needed the efficient searching method for real-time self-localization.
4. REAL-TIME SELF-LOCALIZATION METHOD
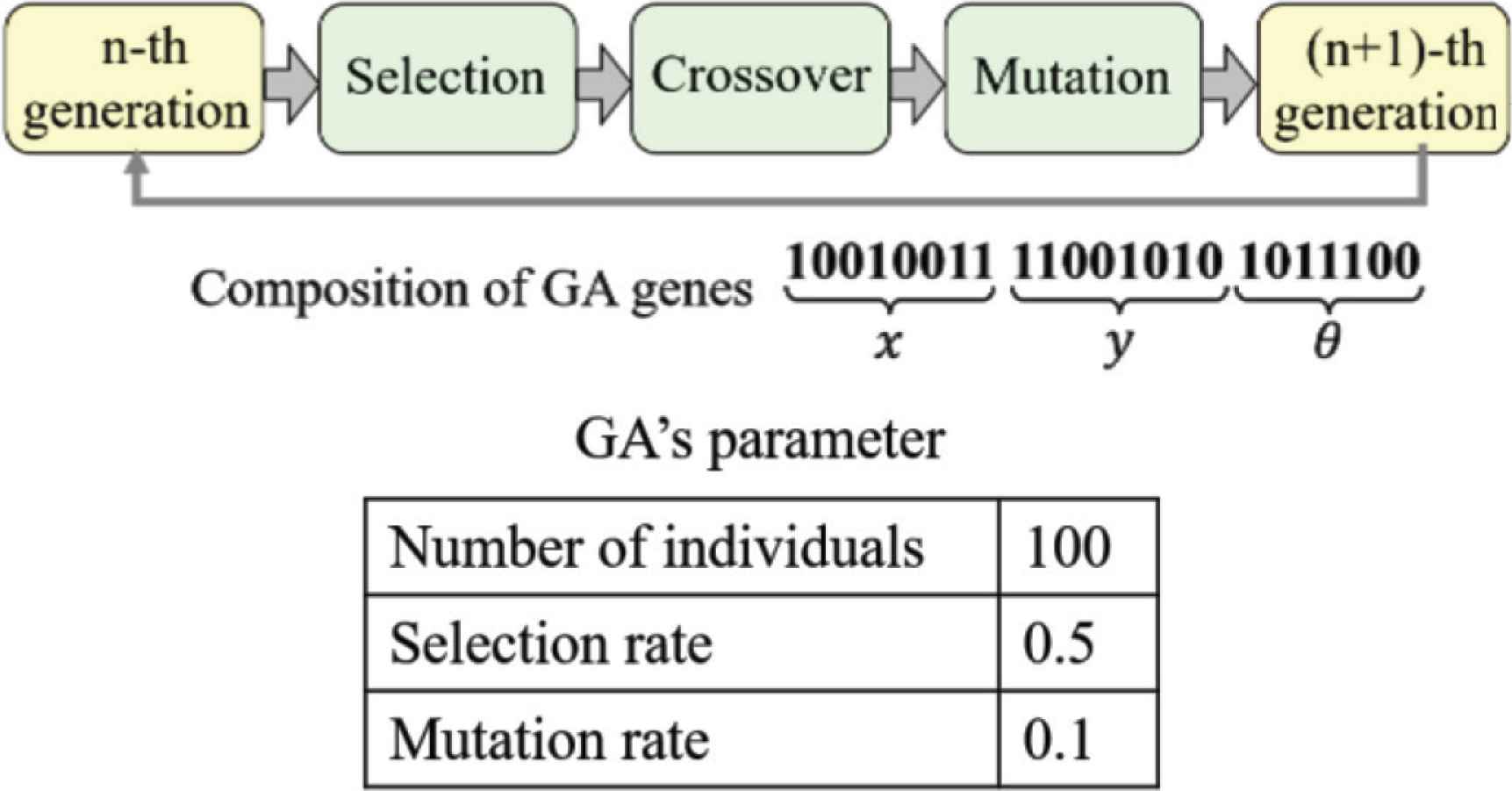
4.1. Genetic Algorithm
In the proposed self-localization method, we use GA for searching the maximum value of the fitness function
GA’s process.
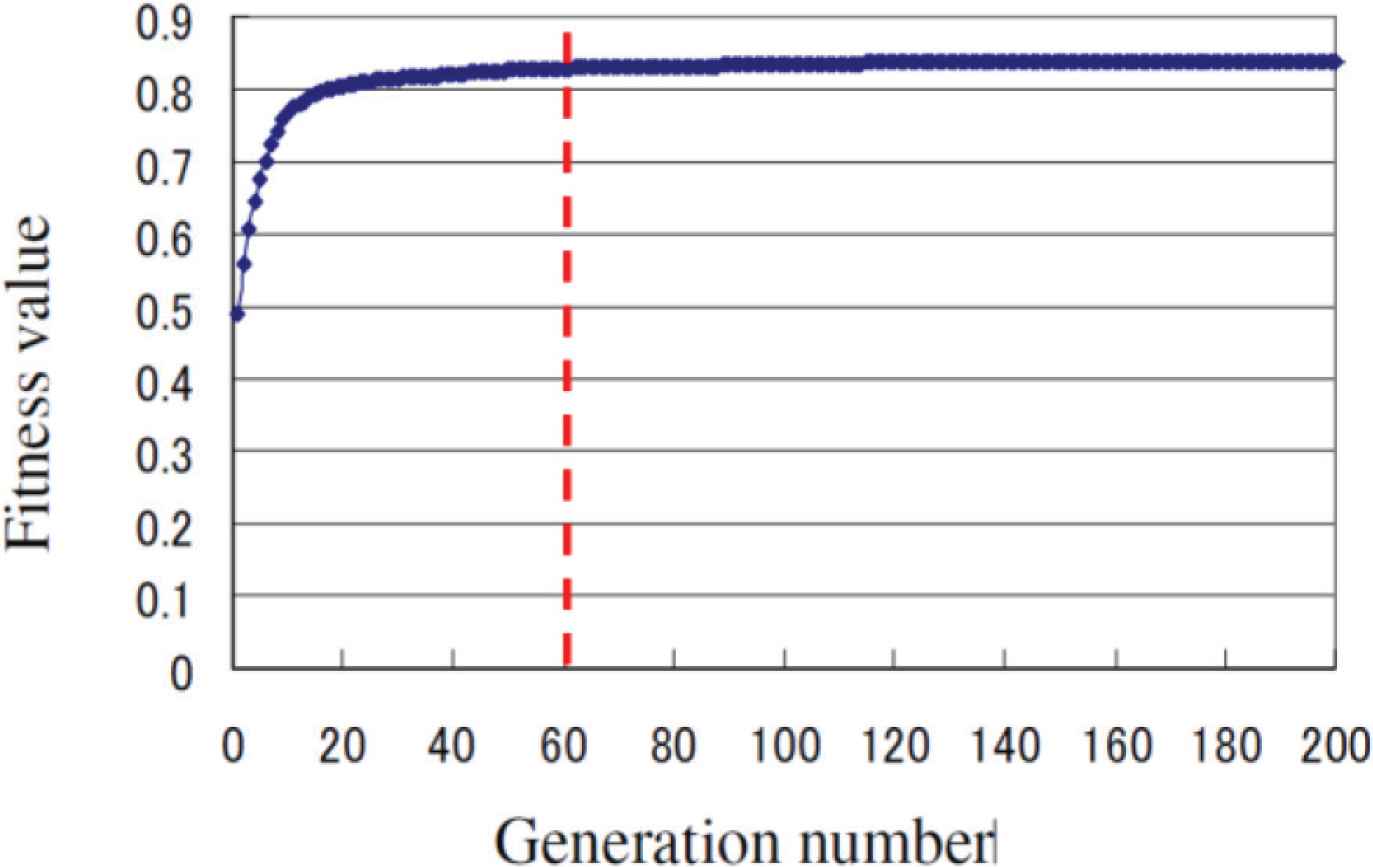
Result of the convergence of GA.
4.2. Verification Experiment using GA
We performed the self-localization experiment to verify the effectiveness of the proposed method using GA. Figure 11 shows the result of the verification experiment that checked the self-localization error using GA as same as Figure 8. Average error of this experiment was 12.9 (cm), and the accuracy of the self-localization by the proposed method is roughly the same as the above-mentioned whole searching.
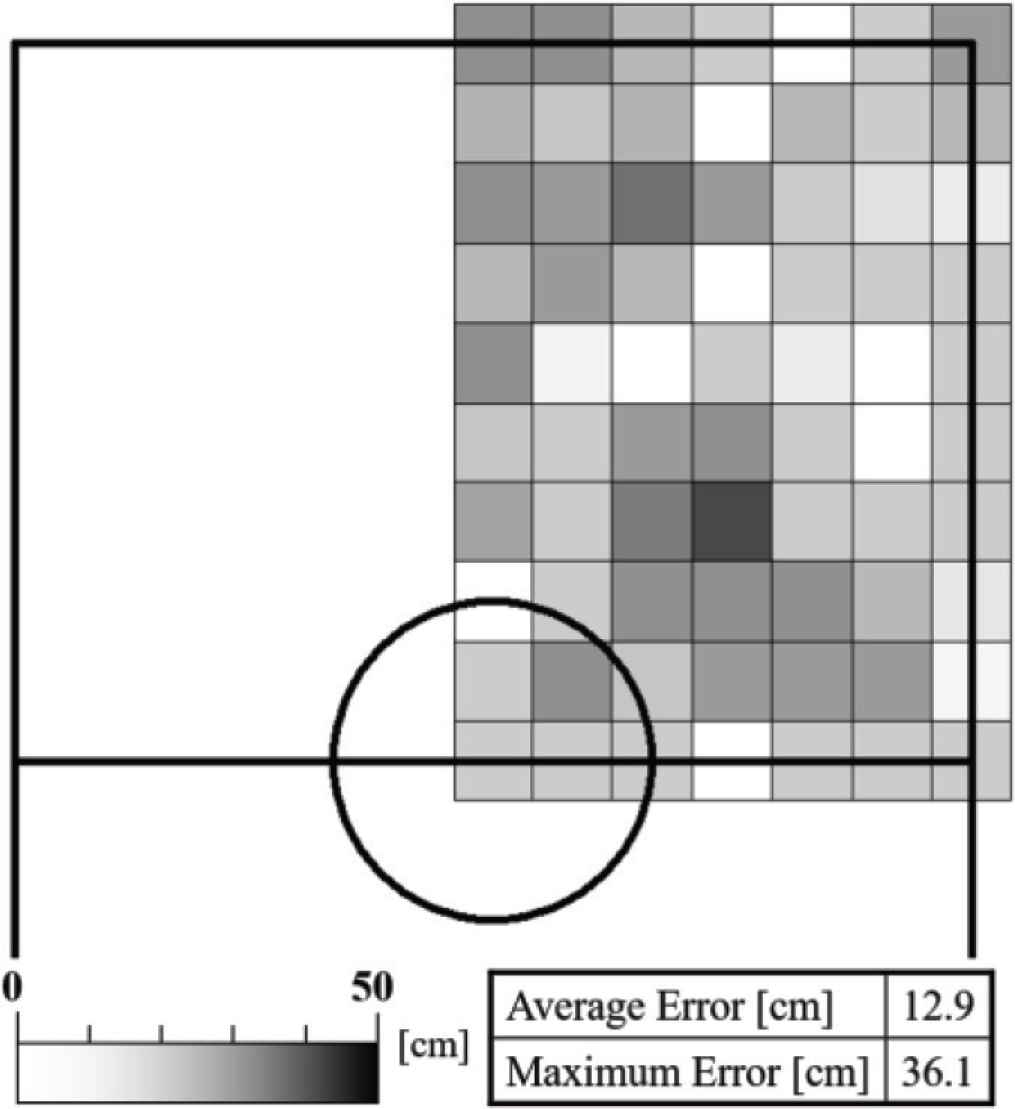
Error of the self-localization using GA.
Moreover, we performed the experiment using five players shown in Figure 12 on the assumption of MSL game. Laptop PC displays the position sent by each robot in real-time, and the positions of five players described in the result image corresponded with the actual position of the robots.

Verification experiment in the real world.
5. CONCLUSION
In this paper, we have proposed the self-localization method which generates the searching space based on a model-based matching with white line information of RoboCup MSL soccer field, and which recognizes the robot position by optimizing the fitness function using genetic algorithm. Moreover, we verified the effectiveness of the proposed self-localization method using GA. Furthermore, we confirmed that the accuracy of the self-localization by the proposed method is enough to play soccer.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENT
This work was supported by “FY2016 MEXT Private University Research Branding Project”.
AUTHORS INTRODUCTION
Ms. Kaori Watanabe
 She received her Master’s degree from the Department of System Electronics and Information Science, Tokyo Polytechnic University, Japan in 2013. She is currently a Doctoral course student in Tokyo Polytechnic University, Japan.
She received her Master’s degree from the Department of System Electronics and Information Science, Tokyo Polytechnic University, Japan in 2013. She is currently a Doctoral course student in Tokyo Polytechnic University, Japan.
Mr. Yuehang Ma
 He received his B.S. degree in Engineering in 2018 from the Faculty of Engineering, Tokyo Polytechnic University in Japan. He is acquiring the M.E. in Tokyo Polytechnic University.
He received his B.S. degree in Engineering in 2018 from the Faculty of Engineering, Tokyo Polytechnic University in Japan. He is acquiring the M.E. in Tokyo Polytechnic University.
Dr. Hidekazu Suzuki
 He is an Associate Professor of Faculty of Engineering at Tokyo Polytechnic University in Japan. He graduated from the Department of Mechanical Engineering, Fukui University, in 2000. He received his D. Eng. degree in System Design Engineering from Fukui University in 2005. His research interest is Robotics.
He is an Associate Professor of Faculty of Engineering at Tokyo Polytechnic University in Japan. He graduated from the Department of Mechanical Engineering, Fukui University, in 2000. He received his D. Eng. degree in System Design Engineering from Fukui University in 2005. His research interest is Robotics.
REFERENCES
Cite this article
TY - JOUR AU - Kaori Watanabe AU - Yuehang Ma AU - Hidekazu Suzuki PY - 2020 DA - 2020/06/02 TI - Real-time Self-localization using Model-based Matching for Autonomous Robot of RoboCup MSL JO - Journal of Robotics, Networking and Artificial Life SP - 98 EP - 102 VL - 7 IS - 2 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.200528.005 DO - 10.2991/jrnal.k.200528.005 ID - Watanabe2020 ER -