homogeneous isotropic turbulence; two-point correlation tensor; infinite-dimensional Lie algebra; minimal set of differential invariants
Abstract
The emphasis of this review is both the geometric realization of the 2-point velocity correlation tensor field Bij(x,x′,t) and isometries of the correlation space K3 equipped with a (pseudo-) Riemannian metrics ds2(t) generated by the tensor field. The special form of this tensor field for homogeneous isotropic turbulence specifies ds2(t) as the semi-reducible pseudo-Riemannian metric. This construction presents the template for the application of methods of Riemannian geometry in turbulence to observe, in particular, the deformation of length scales of turbulent motion localized within a singled out fluid volume of the flow in time. This also allows to use common concepts and technics of Lagrangian mechanics for a Lagrangian system (Mt, ds2(t)), Mt ⊂ K3. Here the metric ds2(t), whose components are the correlation functions, evolves due to the von Kármán-Howarth equation. We review the explicit geometric realization of ds2(t) in K3 and present symmetries (or isometric motions in K3) of the metric ds2(t) which coincide with the sliding deformation of a surface arising under the geometric realization of ds2(t). We expose the fine structure of a Lie algebra associated with this symmetry transformation and construct the basis of differential invariants. Minimal generating set of differential invariants is derived. We demonstrate that the well-known Taylor microscale λg is a second-order differential invariant and show how λg can be obtained by the minimal generating set of differential invariants and the operators of invariant differentiation. Finally, we establish that there exists a nontrivial central extension of the infinite-dimensional Lie algebra constructed wherein the central charge is defined by the same bilinear skew-symmetric form c as for the Witt algebra which measures the number of internal degrees of freedom of the system. For turbulence, we give the asymptotic expansion of the transversal correlation function for the geometry generated by a quadratic form.
We deal with homogeneous isotropic turbulence and the 2-point velocity correlation tensor field Bij(x′,x,t) where x′ and x are the points of a three-dimensional space filled by turbulent fluid. The assumption of homogeneity and isotropy of turbulent flow (invariance with respect to rotation, reflection, and translation) implies that this tensor depends only on the length of the correlation vector r→ and time. Moreover Bij is a symmetric tensor field and takes the diagonal form [11]. Therefore Bij is a metric tensor field given on the correlation space K3 and K3 can be equipped with a Riemannian metric. The form of the components of Bij specifies this metric as the so-called semi-reducible pseudo-Riemannian metric [8]. The components are the correlation functions that evolve due to the von Kármán-Howarth equation [7]. This is conceptually similar to the Ricci flow that acts directly on the metric under consideration. In order to avoid a redundant complexity of the exposition of material, we use only the elementary information about the structure of the two-point velocity correlation tensor of the velocity fluctuations for homogeneous isotropic flows. The modern theory of the properties and structure of second-order (Cartesian) correlation tensors is given in [15]. We only mention that in the course of this development, the authors examined carefully several important misleading or incorrect statements that have remained uncorrected in the literature of the theory of correlation tensors for homogeneous (or isotropic turbulence). Most of these problems arisen because of confusion over the circumstances in which the generating scalar functions can be, or must, pseudoscalar, see for details [15].
The aim of this review is to present both geometric and isometry properties of the 2-point velocity correlation tensor field Bij(x′, x, t) for the case of homogeneous isotropic turbulence which were obtained in [3]–[6] and demonstrates their impact in turbulence. The review is organized as follows. Section 2 contains the results obtained (see [3] for more details) in a compressed form about the geometric realization of the two-point velocity correlation tensor. In Section 3, we present the Lagrangian system generated by ds2(t) and show that it is reduced to a Lagrangian system of the one-degree of freedom for each fixed time t due to the second conservation law obtained. The first integrals of the equations of geodesic curves form the kinematic conservation laws. Section 4 is devoted to symmetries (isometric motions in K3 with the structure of a Riemannian manifold) of the metric ds2(t). In fact, the symmetry transformation looks like as a sliding motion of a surface (the geometric realization of the metric) along itself i.e. the form of this surface is invariant under the symmetry transformation. The properties of an infinite-dimensional Lie algebra obtained are discussed. The basis of differential invariants is constructed and a minimal generating set of differential invariants is derived. The well-known Taylor microscale λg is a second-order differential invariant. We show that λg can be obtained by the minimal generating set of differential invariants and the operators of invariant differentiation. In Section 5 we consider the energy-momentum tensor associated with the metric ds2 and show that the components T(z) and T¯(z¯) of this tensor are holomorphic functions. Then, in the full analogy of Conformal Field Theory (CFT), we expose the asymptotic expansion both for T(z) and T¯(z¯) as z → ∞ and z¯→∞, As a consequence of this result, we get the asymptotic expansion of the transversal correlation function BNN for the large values of the correlation distances. The question about the asymptotic expansion of BNN in the physical space 3 with the standard Euclidian metric is still open. To get the link with physics of isotropic turbulence one needs the construction of a family of isomeric embedding into 3. This is conceptually similar to visualization of Ricci flows (see, for an example [16]) but it demands the specification of the properties of the correlation function BLL which cannot be obtained directly from the von Kármán-Howarth equation in view of the equation in unclosed form and demands at least a suitable modeling. Here we are not concerned these questions.
2. Geometric Realization of the Two-Point Velocity Corellation Tensor
The results of this Section are given in details in [3].
First we recall the elementary information about the structure of the two-point velocity-correlation tensor of the velocity fluctuations for homogeneous isotropic flows. The modern theory of the properties and structure of second-order (Cartesian) correlation tensors is given in [15].
The statistical description of fluid turbulence employ the Reynolds decomposition to separate the fluid velocity u→ at a point x→ into its mean and fluctuating components as u→=u¯→+u→′. Here (⋅¯) is the mean velocity, while u→ is the corresponding fluctuating quantity, usually interpreted as representing turbulence. The two-point correlation tensor is defined by
Bij(x,x′,t)=(u′i(x,t))(u′j(x′,t))¯.(2.1)
where t∈+ and x,x′ are the points of a three-dimensional space filled by turbulent fluid. Rewritten formula (2.1) as
Bij(x,r→,t)=(u′i(x,t))(u′j(x+r→,t))¯,
the vector r→ is determined by the pair (x,x′) where x and x′ are the starting point and endpoint correspondingly or r→=x→′−x→. Therefore we will consider an affine space K3 with the adjoined vector space of the correlation vectors K→3≡{r→=(r1,r2,r3)}. The assumption of homogeneity and isotropy of turbulent flow (invariance with respect to rotation, reflection and translation) implies that this tensor depends only on the length of the correlation vector r→ and time t i.e.
Moreover for isotropic turbulence, Bij(|r→|,t) is a symmetric tensor and the correlations Bij can be expressed by using only the longitudinal correlational function BLL(|r→|,t) and the transversal correlation function BNN(|r→|,t) [11] i.e. the correlation tensor Bij takes the diagonal form with the components B11 = BLL and B22 ≡ B33 = BNN in a suitable system of the coordinates of the adjoined vector space. Further instead of directly employing the correlation function BLL and BNN, we use their normalized representations f and g where BLL=u′2(t)¯f(|r→|,t),BNN=u′2(t)¯g(|r→|,t) with the turbulence intensity equals u′2(t)¯=BLL(0,t). Then the corresponding quadratic form (or linear element) takes the form
where dl2(t) is an indefinite quadratic form in view of the properties g(|r→|,t), see below. The normalized transversal correlation function g satisfies the relation (taken from the continuity) [2]
g(|r→|,t)=f(|r→|,t)+r2∂∂rf(|r→|,t).(2.3)
The property that f decays faster that |r→|−2 on infinity together with equation (2.3) yields [2]
∫0∞|r→|g(|r→|,t)d|r→|=0.(2.4)
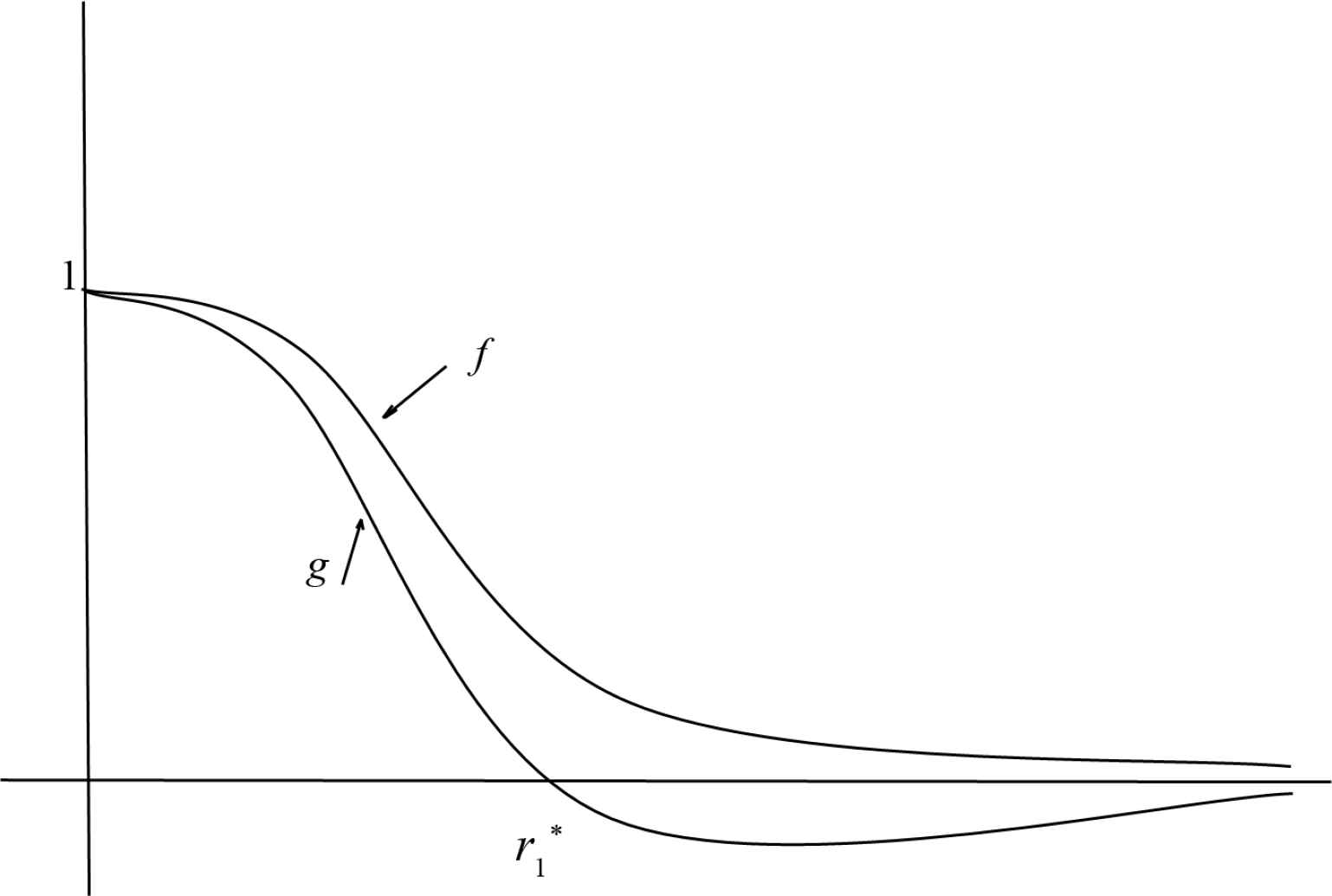
Hence g(|r→|,t) is an alternative sign function. Typical forms of experimentally measured functions f and g are given on Figure 1.
Fig. 1.
Typical forms of the normalized longitudinal and transversal correlation functions.
The data presented we use to determine the qualitative behaviors of f and g, in particular, the algebraic properties of these correlation functions. Thus, we will assume that f is a positive everywhere function, g changes sign only in interval (−ε+|r→*|,|r→*|+ε),ε>0. g is a positive function on [0,±|r→*|) and therefore g < 0 outside of [−|r→*|,|r→*|]. The change sign of g means that the quadratic forms dl2(t) have a variable signature. The normalized longitudinal correlational function f(|r→|,t) is dynamically evolved due to the von Kármán-Howarth equation [9]
h is the normalized triple-correlation function and u′2(t)¯ is the turbulence intensity (a positive everywhere function that vanishes on infinity) or the velocity scale for the turbulent kinetic energy, u′2(t)¯3/2 determines the scale for the turbulence transfer. This single equation directly follows from the Navier-Stokes equation (see, e.g. [11]) and contains two unknowns f, h with the turbulence intensity u′2(t)¯ which cannot be defined from (2.5) without the use of additional hypothesis.
If we consider in the correlation space K3 an infinite cylindrical domain. Then the metric (induced by the quadratic form Bij) of the surface which bounds this domain takes the form
where ρ denotes the Euclidean radius of the cross-section {a} × S1(ρ) of the surface ×S1(ρ), a ∈ R. We can account that ρ = 1 and identify this manifold with ×S1(1). The functions f, g are non-dimensional with f(0,t) = g(0,t) = 1 and physically f is a positive function such that f → 0 (g → 0) as |r→| tends to infinite. Moreover, f and g are bounded even functions such that f ≤ 1, |g| ≤ 1 and f goes faster to zero than |r→|−2, when |r→| tends to infinity. Physically such behavior of f is acceptable [2] and the map
q(a,t)=∫0af(|r→|,t)d|r→|,a∈
acts as (−∞,∞)↦[−L*(t),L*(t)],L*(t)=L(t)/2u′2(t)¯, where L(t) is determined by the formulas
L(t)=2∫0∞u′2(t)¯f(|r→|,t)d|r→|.(2.7)
Now we rewrite the metric ds2(t) in the frame of the variable q
A point p0is called the pole [8] of a (pseudo-)Riemannian manifold M if p0is a fixed point of a group of diffeomorphismsg(x→,a→),a→=(a1,…,ar)which acts on M.
We note that if p = p0 (p0 is the pole of gτ) then X2(p0) = 0 and due to (2.9)p0 coincides with the roots of the equation G(q, ⋅) = 0. Therefore the points q* ∈[− L*(t), L*(t)] wherein G vanishes are the poles of gτ. In view of our assumption on g(|r|, t), the equation G(q, ⋅) = 0 has only 4 roots qi*, i = 1, …, 4 such that |q1*|=q4*=L*(t) and |q2*|=q3*. Thus the metric (2.8) has the different signature for q∈I1=(q2*,q3*) and q∈I2=(−L*(t),q2*),q∈I3=(q3*,L*(t)) respectively where qi* depends on t. This metric determines for q ∈ I1 the element of length of the surface of revolution in 3 and the radius-vector R→=(q,ϕ,⋅) of this surface is given by
Therefore the model manifold defined by (2.8) for q ∈ I1 is a cylindrical-type surface MI1t=(q2*,q3*)×S1(1) wherein the radius of the cross-section {q} × S1(1) equals G1/2(q, t). For q ∈ Ii, i = 2,3 the function G is negative. The metric
can be realized (see for details [3]) as a surface of revolution (for each fixed time) in the Minkowsk space 1,23 with the element of length
dρ2=dx12−dx22−dx32
when the form ds2(t) is of a fixed sign. Here the rotation presents the motion along the pseudo-circle of the radius |G(q, ⋅)|1/2, q ∈ Ii. Indeed, let us fix the point pa = (qa, ϕa) on the cross-section {qa} × S1(1) and consider the action of the group gτ on pa i.e. the orbit Opa:τ↦gτ(pa). This action is a motion along {qa} × S1(1) and if pa does not coincide with the poles gτ then Opa is a not compact set [8]. In particular, Opa⊆{(x1,x2):x12−x22=u′2(t)¯|G(qa,t)|} for each fixed time t which coincides with the so-called pseudo-circle under the embedding MI3t(MI2t) into the Minkowski space 1,23. Moreover, the poles are saddle points of a negative index for the orbits Op,p∈M13t(M12t). The cross-sections {qa} × S1(1) of MI3t(MI2t) for qa∈{q3*,L*(t)}
(respectively qa∈{−L*(t),q2*}) are the pseudo-circles of zero radius and consist of the isotropic rays with the initial points q3* and L*(t) (respectively −L*(t) and q2*). The action of gτ on the point p is a motion along these piecewise linear isotropic curves when p∈{−L*(t),q2*,q3*,L*(t)}. We can identify MI3t(MI2t) with the foliation space of orbits MIjt=∪pOp and associate the modulus of the transversal correlation function G(q, t) with the length of the velocity vector ξ→(p) of the orbit Op by |ξ→(p)|=u′2(t)¯χ|G(q,t)|. The length of displacement of the point p (or the length of arch), with respect to the vector field generated by gτ(p), is determined by the formula
for each fixed time that defines the following length scale along the orbit Op
λOp=χu′2(t)¯|G(q,t)|2πϕ,q∈(q3*,L*(t)),χ=1.
The constant χ can be fixed by normalizing the velocity vector ξ→(p).
The Gaussian curvature K++ of the manifold MI1t admits a singular behavior at the poles q2* and q3* where G vanishes for Gq(qi*,t)≠0,i=2,3. In the case when the poles are multiplicative zeroes of some finite order i.e. G(qi*,t)=Gq(qi*,t)=…Gq…q(qi*,tc)=0 then the direct calculations show that again K++ is a singular function at qi* for all t. If zero is of infinite order then G(q, t) ≡ 0 in a neighborhood of q2*(q3*) under the assumption that G is an analytical function. The same argument we can apply to investigation of the behavior of the Gaussian curvature of the manifold MI3t(MI2t) for the poles g3*(g2*). In the case of the pole q4*=L*(t)(q1*=−L*(t)) we use that f and therefore g have to go faster to zero than |r→|−2 when |r→|→∞. Employing the formula Gq=f−1/2gr,r=|r→| and the above-mentioned assumption about the behavior f (and G) as |r→|→∞ (and q→±L*(t)), we derive in terms of the variable |r→| that |K| have to go faster to infinity than |r→|2 when |r→|→∞(q→±L*(t)).
We indicate a connection between the Gaussian curvature K++ of MI1t and the transverse Taylor microscale λg (see, e.g. [11]) which is defined by λg2(t)=−2(grr(0,t))−1. It is easy to show that
where λf(t)2=2λg(t)2 is the Taylor longitudinal scale. This formula shows that the Gaussian curvature of MI1t is positive for small values of |q|. Moreover, the formula (2.11) gives the connection between the geometry of MI1t and the microscales arising in turbulence. Using the well-known relationship between turbulent length scales (see, e.g. [11])
λg(t)=10η2/3𝓁t1/3
where η is the Kolmogorov length scale and 𝓁t is the integral length scale characterizing the large eddies, we can write that
K++=110η4/3𝓁t2/3forthecross-section{0}×S1.
The Kolmogorov scale η varies with the viscosity v and the dissipation of turbulent energy ε according to η = (ν3 / ε)1/4. In the limit of infinite Reynolds numbers or vanishing the viscosity ν, ν decreases and the Gaussian curvature K++ restricted on the cross-section {0} × S1 grows infinitely. It means that MI1t has singular points at q = 0 which forms the so-called break circle where the manifold loses smoothness.
The peculiarity of the metric presented consists in arising the singularity of “the shrinking cylinder type” due to alternative sign of the transversal correlation function BNN. It means that we can describe “shrinking phenomenon” for a singled out cylinder in terms of singularity points of the metric (2.8).
3. Lagrangian system
We write the metric ds2(t) in the conformal form at first for q ∈ I1. Let us consider on the interval I1 a new measure dζ with the density σ(q,t)=1/u′2(t)¯G(q,t) for each fixed time and rewrite ds2(t) as
ds2(t)=F(ζ,t)(dζ2+dϕ2),(3.1)
where F(ζ,t)=u′2(t)¯G(q,t). For q ∈ Ii, i = 2,3 this metric takes the form
ds2(t)=F(ζ,t)(dζ2−dϕ2).(3.2)
Here F(ζ,t)=u′2(t)¯|G(q,t)| and dζ=u′2(t)¯|G(q,t)|dq. The equations for geodesic curves on the manifold MI1t in the frame of (3.1) read
Here we use the coordinates (ζ, θ) for each chart of the manifold Mt. Integrability of these systems of equations is established by the usual way. The systems of equations (3.3) and (3.4) admit the following first integrals
F(ζ,t)ϕθ=M,F(ζ,t)(ζθ2+ϕθ2)=N
and
−F(ζ,t)ϕθ=M,F(ζ,t)(ζθ2−ϕθ2)=−N
correspondingly where M and N depend on the time t in general. Let us consider now the vector M→=F(ζ,t)ϕθ[dζ,dϕ]dl2. This is the so-called momentum vector from the cotangent vector space to the one-parametric group of (isometric) motion gτ. Here [⋅, ⋅]dl2 denotes the vector product with respect to the metric dζ2 ± dϕ2. The equality F(ζ, tc) ϕθ ≡ M = const means that the momentum vector M→ is a conserved quantity: dM→/dθ=0 for each fixed time t. On the plane (dζ, dϕ) the momentum vector M→ is calculated by the formula M→=[p→,p→θ]dl2,p→(θ,t)=(ζ(θ,t),ϕ(θ,t)). Without loss of generality (in view of the invariance of ds2(t) with respect to gτ), we can write p→(θ,t)=F1/2(ζ,t)dζ and dp→/dθ=(F1/2)θdζ+F1/2dζθ=(F1/2)θdζ+F1/2ϕθdϕ. Therefore
where the first bracket vanishes and the length of the vector [dζ, dϕ]dl2 equals –1 (1) for the signature (+−)((++)). Using the above-mentioned first integrals or the compatible differential constraints to (3.3),(3.4), the reduction of (3.3) on invariant manifolds defined by these constraints leads to the following equation
d2ζdθ2+Fζ2F(±N∓2M2F−1F)=0,
where the upper sign in ± ⋯ ∓ corresponds to the signature (++) and the lower symbols are reserved for the signature (+−). The second equation of this system is satisfied identically on the constraint ± F(ζ,t) ϕθ = M for the different signature. As a result, we obtain
considering t as a parameter. Equation (3.5) coincides with the well-known equation of the motion of a unit mass point in the potential field with the effective potential energy V (the terminology of Newtonian mechanics is used). Then the Lagrangian SMIit and the “total mechanical” energy EMIit read
SMIit=12(dζdθ)2−V,EMIit=12(dζdθ)2+V.
Here EMIit is the conserved quantity on solutions of equation (3.5) for each fixed time t. Therefore the couple (MIit,ds2(t)) generates a Lagrangian system of the one-degree of freedom. Hence
dθ=dζ2(EMIit−V),dϕ=±MdθF(ζ,t)(3.6)
and the standard excepting dθ leads to the following equation for ζ = ζ(ϕ)
dζdϕ=F(ζ,tc)±M2(EMIit−V).
Geometrically, the parameter θ is the length of arch of a non-isotropic geodesic curve with the initial position at the corresponding pole. If this length is changed then in the course of during this process the “total mechanical” energy and momentum are preserved quantities along geodesic curves. The angle α between the vector
The case of cos α = 0 corresponds to the motion along the orbit Op, where ξ→2(gτ(p))= const (F ≡ const) and this orbit presents unclosed curve in the case of (MIit,ds2(t)) for i = 2,3. Notice that in the sharp contrast to the previous consideration about the dynamics of a fluid particle on the surface of revolution MI1t the zero value of |ξ→2(gτ(p))| means that Op belongs to the so-called isotropic curve (ds2(t) = 0) which is given by ϕ = ζ−ζ0 (or ϕ = −(ζ−ζ0)). This curve coincides with the pseudo-circle of zero radius. The canonical parameter θ (the length of the corresponding isotropic curve) is defined by the formula
Here (ζ0, 0) is the coordinate of the corresponding pole of MI3tc(MI2t). The existence of closed geodesic curves depends on the form of the potential V.
The above-mentioned conservation laws are standard consequence of invariance of the flow with respect to the translation and rotation groups. Note that the quantity F(ζ,t)(ζθ2±ϕθ2) means geometrically that along geodesic curves the length of tangent vectors is conserved. Together with the length of the momentum vector M→ they present new conserved quantities arising in homogeneous isotropic turbulence, see [4].
4. Isometries
We consider the functional of simple action in (Mt, ds2) and present isometric motions in K3. The peculiarity of these transformations consists in: we look for their in the class of equivalence transformations that preserve the length of tangent vectors F(ζ,t)(ζθ2±ϕθ2) along geodesic curves with fixed endpoints. For more details see [5].
4.1. Equivalence transformation
Instead of the variables (ρ, ϕ), we consider
ξ=eζcosϕ,η=eζsinϕ,
then
ds2=Λ2(ρ,t)(dξ2+dη2),
and
ds2=Λ2(ρ,t)(dξ2−dη2),Λ2(ρ,t)≡F(ζ,t)
for
ξ=eζcoshϕ,η=eζsinhϕ.
Consider the set of piecewise smooth curves Ω(MIit,v,w):γIi:J→MIit with fixed endpoints γIi(0)=vi and γIi(1)=wi. Let LγIit:Ω(MIit,vi,wi)→ be the functional of length (the simple action) for each fixed time t. Then the formula
defines the function of distance dIit:MIit×MIit→. We can account that τ is the so-called natural parameter i.e
Λ2(ρ,t)(ξτ2±ητ2)=1alongthecurveγIi.(4.1)
Therefore
LγIit=∫γIi1⋅dτ=τγIi,
where the symbol τγIi denotes the length of γIi Let r→i=r→i(ξ,η) be a local realization of MIit in a chart (ξ, η). Consider an infinitesimal transformation of the variables ξ and η
ξ*=ξ+δξ,η*=η+δη,(4.2)
assuming that r→i is the differentiable vector-function. Then we can write
r→i(ξ*,η*)=r→i(ξ,η)+Xδξ+Yδη(4.3)
or
r→i*(ξ,η)=r→i(ξ,η)+U→(ξ,η)(4.4)
where U→(ξ,η) denotes an infinitesimal deformation of the surface with the radius-vector r→i(ξ,η). We can account that r→i*(ξ,η) is the radius-vector of the deformed surface and γii is transformed into γIi* which belongs to the same class of functions just as γIi. In order to investigate the invariance of dIit under the action of infinitesimal transformations, it is sufficient to prove that the length of arch of extremals of the functional above is invariant. Instead of the tangent vector (ξ, η), we consider the co-vector (τξ, τη) defined by the formulas (for brevity we omitted the index γIi for τ)
This equation is the eikonal-type one (the relativistic eikonal equation for the signature (+−)). Therefore in order to find isometries of LγIit we can consider symmetries admitted by equation (4.5) that leaves τ invariant. The restatement of the variational symmetry in the terms of symmetry of partial differential equations (4.5) enables us to extend the class of isometry transformations admitted by the functional LγIit. More exactly, we extend the variational symmetry up to the equivalence transformations. Recall that equivalence transformations for a differential equation in given class is a change of variables which maps the equation to another equation in the same class. An equivalence transformation admitted by (4.5) is a point transformation given on (ξ, η, u1, u2) space where u1 = τ, u2 = Λ2. Infinitesimally, we look for an operator in the following form [12], [13]
where the coefficients are defined due to the equation
Y1|(4.5)=0.(4.7)
Here Y1 denotes the first prolongation of Y. In the case of the signature (++) the coefficients of the operator Y have been calculated in [12]. For the relativistic eikonal equation i.e. for the signature (+−) these calculations are given in [5]. The infinitesimal operator Y reads:
Its Lie (infinite-dimensional) subalgebra is of the form
X=Φ(ξ,η)∂∂ξ+Ψ(ξ,η)∂∂η−2Φξ(ξ,η)Λ2∂∂Λ2(4.8)
and τ is a scalar invariant of X. Therefore X is a symmetry operator admitted by the functional LγIit. Here the functions Φ(ξ, η) and Ψ(ξ, η) satisfy the Cauchy-Riemann differential equations Φξ = Ψη and Φη = −Ψξ in the case of the eikonal equation and Φξ = Ψη, Φη = Ψξ (the so-called h-conjugate functions [10]) for the relativistic eikonal equation. To expose a fine structure of the equivalence transformation generated by X, we consider the case of the signature (++) and the complex coordinates z = ξ + iη and z¯=ξ−iη Then
Here F=Φ+iΨ,F¯=Φ−iΨ and we use that F(z,z¯)≡F(z),F¯(z,z¯)≡F¯(z¯) for the holomorphic function F. The tangent space is spanned by
ddz=12(∂∂ξ−i∂∂η),ddz¯=12(∂∂ξ+i∂∂η).
For small perturbations z↦z+ε(z) and z¯↦z¯+ζ¯(z¯) we find the representation of the operator X1. Infinitesimal holomorphic transformations of the variables z and z¯ read
z*=z+ε(z)=z+F(z)δs,z¯*=z¯+ε¯(z¯)=z¯+F¯(z¯)δs(4.9)
which are generated by the vector field
(F(z)ddz,F¯(z¯)ddz¯).
Using the Laurent series
ε(z)=−∑n=−∞∞εnzn+1,ε¯(z¯)=−∑n=−∞∞ε¯nz¯n+1,
where εn(ε¯nz¯) are infinitesimal small numbers. We can look at εnzn+1,ε¯nz¯n+1 as the harmonics of decomposition of ζ(z),ζ¯(z¯) with respect to the basis functions {zn+1}({z¯n+1}). Each harmonics generate the transformations z→z′≡z−εnzn+1,z¯→z¯′≡z¯−ε¯nz¯n+1 and the corresponding infinitesimal generators:
ln=−zn+1ddz,l¯n=−z¯n+1ddz¯,
where εn,ε¯n are the parameters of the transformation, presents the basis of the infinite dimensional conformal Lie algebra (two copies of the Witt algebra)
The algebra W is isomorphic two copies of the Witt algebra W.
Notice that {k0, k±1} form a subalgebra of W and its projection {l0, l±1} isomorphic to sl(2, C). The transformations of the variables z and z¯ generated by the infinitesimal operator form an infinite dimensional Lie pseudo-group G=Γ⊗Γ¯ where Γ and Γ¯ are the infinitesimal holomorphic transformations (4.9). The conformal group of the transformations z ↦ z* consists in the set Mb of Möbius transformations φ[17]:
For the transformations z¯↦z¯* the corresponding conformal group we denote by Mb¯. The set Mb (Mb¯) of all global conformal transformations forms a group with respect to composition. This group operation coincides with the matrix multiplication in SL (2, C). Mb is isomorphic to the group Aut(P) of all biholomorphic maps of the Riemann sphere P. It is used the compactification ↦P to do the transition from the group Mb to Aut(P)
Consider the infinitesimal operator (4.10) for the signature (+−) of the metric. It leads to the following relationships for the coordinates of the operator X1
Φξ=Ψη,Φη=Ψξ.
It gives the transformation
ξ*=u(ξ,η),η*=v(ξ,η),(4.12)
with uξ = vη, uη = vξ and generates the Lie group of orientation-preserving conformal diffeomorphisms of the Minkowski plane 1,12 (see, e.g. [17]). The group of all conformal diffeormorphisms of 1,12, endowed with the topology of uniform convergence on compact subsets, consists of four components. Each components is homeomorphic to Diff+()×Diff+(). Here Diff+() denotes the group of orientation-preserving diffeomorphisms F: ↦ with the topology of uniform convergence of F and all its derivatives on compact subsets K⊂. We replace 1,12 with 𝕊1,1=S1×S1 in the sense of the conformal compactification of the Minkowski plane where S1 is the unit circle. The conformal group Conf (1,12) is defined as the connected components containing the identity in the group of all conformal diffeomorphisms 𝕊1,1↦𝕊1,1. Moreover Conf (1,12) is isomorphic to Diff+ (S1) × Diff+ (S1). Diff+ (S1) turns out to be a Lie group with models in the Fréchet space of smooth real-valued functions F: S1 ↦ R endowed with the uniform convergence on S1 of F and all its derivatives. The corresponding Lie algebra Lie(Diff+ (S1)) is the Lie algebra of smooth vector space fields Vect(S1) (see, e.g. [17]). A finite dimensional counterpart of Conf(𝕊1,1) is the group SO (2,2) / {±1} ⊂ Conf (𝕊1,1). This group is generated by the translations and the Lorent transformations, which form a three-dimensional subgroup, and moreover by the dilations and the special transformations. The space C∞(S1) can be described as the vector vector space C2π∞() of 2π-periodic functions. A vector field Y ∈ Vect(S1) has the form Y=y(θ) ∂ / ∂θ, where y(θ)∈C2π∞() and where the points z of S1 are represented as z=eiθ. The representation of y(θ) by a convergent Fourier series
y(θ)=a0+∑n=1∞(ancos(nθ)+bnsin(nθ))
leads to basis system for Vect(S1):
ddθ,cos(nθ)ddθ,sin(nθ)ddθ.
Consider the complexification of Vect(S1)
Vect(S1)=Vect(S1)⊗
and polynomial vector fields on S1. Define
l^n=−zn+1ddz=iznddθ=ieinθddθ∈Vect(S1).
The liner hull of the l^n over is again the Witt algebra. The Witt algebra W is a part of the complexified Lie algebra Vect(S1)×Vect(S1). Similar as for the signature (++) we can define
k^n=l^n−(n+1)znΛ2ddΛ2
with the same rule of transformation of the factor Λ2. The commutation relations for k^n and k^m are the same as before for kn and km.
4.2. Invariant differentiations
Now we define the operators of invariant differentiations. Below we use the symbols ++ and +− which corresponds to the consideration of G++ and G+−. In the variables ξ and η, the operators of invariant differentiations are determined by the formula [14]
S++i=λ→i⋅(Dξ+Dη),S+−i=μ→i⋅(Dξ+Dη),D=Dξ+Dη,i=1,2,
where the vectors λ→i and μ→i are calculated from the equations
J++(λ→i)=ci,J+−(μ→i)=ci,ci∈R3,
ci are chosen to be c1=(0,1,0), c2=(0,1,1). J++ and J+− are found as solutions of the equations
[X1+++(λ→i⋅D)χ→⋅∂λ]J++=0,(4.13)
[X1+−+(μ→i⋅D)χ→⋅∂μ]J+−=0,(4.14)
where ∂λ=λ1∂ / ∂λ1+λ2∂ / ∂λ2 and correspondingly ∂μ=μ1∂ / ∂μ1 + μ2∂ / ∂μ2. Here χ→=(Φ,Ψ,0),X1++ and X1+− denote the first prolongations of the operator X1 for the signatures (++) and (+−) correspondingly. These operators read
wherein we used the Cauchy-Riemann conditions Φξ=Ψη, Φη=−Ψξ for the operator X1++ and the h-holomorphic conditions Φξ = Ψη, Φη = Ψξ in the case of the operator X1+−. Equation (4.13) has the following two functionally independent solutions
J1++=Λ2(λ12+λ22),J2++=λ1τη−λ2τξ,
the vectors λ→i are defined by
λ→1=(τξΛ2,τηΛ2,0),λ→2=(τηΛ2,−τξΛ2,0).
What about equation (4.14), we have the following two functionally independent solutions
J1+−=Λ2(μ12−μ22),J2+−=μ1τη+μ2τξ,
and the vectors μ→i equal
μ→1=(τξΛ2,−τηΛ2,0),μ→2=(−τηΛ2,τξΛ2,0).
We give the following comments to these relationships obtained. Let us consider nontrivial solutions of the equation
The actions of S2++ and S2+− on I1++ and I1+− correspondingly lead to preserving the length of the tangent vector (ξ, η) to the geodesic curves of length equals τ. It means that the geodesic curves under the action of G++ and G+− transformed into the geodesic curves.
According to Tresse theorem [14], using the operators Si++ and Sj++,i,j=1,2 and the scalar invariant I1++=I1+−=τ, we can construct finite basis of differential invariants of G++ and G+− by functional operations and the invariant differentiation. In particular, the Gaussian curvature K reads
and K++, K+− are the differential invariants of the second order of G++ and G+− correspondingly. This fact is checked by direct calculations which show that
X2++K++=0,X2+−K+−=0
where X2++ and X2+− denotes the second prolongation of the operator X for the signature (++) and (+−) correspondingly. These two differential invariants K++ and K+− can be expressed in the form
K++=V(Si++I1++)K+−=−V(Si+−I1+−),i=1,2
where V(Si++I1++) and V(Si+−I1+−) are some differential-algebraic expressions. Due to the formula (2.11) which connects K++ and the Taylor microscale λg and the result above, we can claim that the Taylor microscale is a differential invariant of G++.
4.3. Local shape structure of MIit
Consider the manifold MI1t. We showed that in every chart of MI1t acts the Lie pseudo-group G++ that preserves the form of the metric and generates infinitesimal deformations of the surface MI1t. This deformation is evoked by the infinitesimal transformations
ξ*=ξ+δξ,η*=η+δη,
or in the complex variables
z*=z−∑n=−∞∞εnzn,z¯*=z−∑n=−∞∞εnz¯n
Therefore we have infinite number of transformations of the form
zn*=z−εnzn,z¯n*=z¯−εnz¯n.
We establish that these transformations generates sliding MI1t along itself. In other words there is no deformations of MI1t in the direction of normal vector to the surface MI1t at the corresponding points of this deformation. In order to prove this assertion assume the contrary i.e. we can think that
U→(ξ,η)=h⋅n→+g⋅k→,
where the second term responses for sliding MI1t along itself. Hence we can write r→*=r˜→+h⋅n→ wherein r˜→=r→ after sliding. For r→*=r→*(ξ→*,η→*) the metric reads
Here H, K are the average and Gaussian curvature, L, M and N are the coefficients of the second quadratic form. The conformal transformations conserve the form of metrics, it means that we have h ≡ 0. This factum also follows from the well-known result about the transformation of metrics to the canonical (conformal) form by a quasi-conformal mapping ω = ω(z), z = ξ + iη which satisfies the Beltrami equation
The conformal property of the transformation ξ↦ξ*,η↦η*(orz↦z*,z¯↦z¯*) leads to vanishing p and therefore h = 0. Here Λ2(ξ, η) is transformed to Λ*2(ξ*,η*) according to the formula
Λ*2(ξ*,η*)=Λ2(ξ,η)(∂z*/(∂z)⋅(∂z¯*/∂z¯)
which coincides with (4.8) and completes the proof.
This assertion we use to classify the shape of MI1t at least locally. The tangent components of the vector of displacement U→(ξ,η) we denote by uα, α = 1,2 and then U→=uατ→α where τ→1=(1,0), τ→2=(0,1). The kinematic system of equations of the field of displacements in the case of sliding MI1t along itself is of the form (see for details [18])
∇αuβ+∇βuα=0,α,β=1,2,(4.19)
where ∇αuβ=∂uβ/∂xα−Γαβλuλ. We introduce into the consideration the complex function of displacement w = u1 + iu2 and define for the positive Gaussian curvature K++ > 0 the function
The derivation of equation (4.20) from the kinematic system of equations (4.19) is given in [18] The direct calculations of the Cristoffel symbols in (4.21) show that
14(Γ221−Γ111+2Γ122)=0,i4(Γ112−Γ222+2Γ121)=0.
Therefore the function W is a holomorphic function and the complex function of displacement w = w(z) reads
w(z)=aK++1/2Θ(z),
where Θ(z) is a holomorphic function. In the case when WI1t is a part of the spherical surface then w(z)=(1+zz¯)−2Θ(z). In general the following classification theorem holds
The condition B ≡ 0 is satisfied for the second-order algebraic surfaces of a positive Gaussian curvature and only for such surfaces.
As a corollary of this theorem, we can claim that in each chart where MI1t has a positive Gaussian curvature the surface MI1t, takes locally the form of a part of ellipsoid (in particular sphere), bicameral hyperboloid or paraboloid. Notice that for K++ < 0 there is no similar result to classify surfaces of negative Gaussian curvature. It is well-known that each second-order algebraic surface of revolution with positive Gauss curvature K++ > 0 can be transformed by an infinitesimal pressure along any parallel into the surface of variable curvature. If this infinitesimal pressure is not scaling then we get a surface which different from the second-order algebraic surfaces.
Consider now the manifolds MIjt,j=2,3 with the metric of (+−) signature. For convenience, we introduce new coordinates (which are standard in CFT)
ξ+=ξ+η,ξ−=ξ−η.(4.22)
This change of coordinates is simply a rotation on the angle π/2. Let us perform a Wick rotation η ↦ iη, i2 = −1 that results in
ξ+↦z=ξ+iη,ξ−↦z¯=ξ−iη,
with the metric ds2=Λ2(zz¯)dzdz¯. Denote by iMIjt, i2 = −1, j = 2, 3 a transformation of MIjt under the Wick rotation, we can look on iMIjt as the complex realization of MIjt in the new chart (z,z¯). The classification of MIjt can be formulated in the terms of iMIjt applying the reasoning above.
5. Asymptotic Expansion of the Transversal Correlation Function
Consider in K3 an infinite cylindrical domain. Fix the cross-section {0} × D2 of this domain where D2 is a two-dimensional disk. Then the quadratic form dl2(t) induces on the above-mentioned cross-section the metric
dLD22(t)=u′2(t)¯g(|r→|,t)(dr22+dr32),(5.1)
where |r→|=r22+r33. Consider the set Ω(D2, v, w) of piecewise smooth curves γ: J → D2 with fixed endpoints γ(0) = v and γ(1) = w and the functional of action of the trajectory γ
Eγt=∫γu2(rτ22+rτ32)dτ.
We can rewrite it in the following form
Eγt=∫γ(u2)−1(τr22+τr32)dτ,τr22+τr32=u2,(5.2)
where u2=u′2(t)¯g(|r→|,t). It takes the form in the complex variables frame
Eγt=4∫γ(u2)−1(zz¯,t)∂zτ(z,z¯)⋅∂z¯τ(z,z¯)dτ.(5.3)
The classical energy-momentum tensor is defined by
Tik=gklfxiα∂L∂fxlα−gikL,(5.4)
where L=L(fj,fxki) is a Lagrangian. For the functional (5.2) with the scalar field τ this tensor takes the form
Tik is a traceless tensor due to the equality T11+T22=2(τr22+τr32−u2)=0. Denote by ω→=(r2,r3). and δ→ω=(δr2,δr3). Then the current is defined by jμ = Tμν δων and has an automatically vanishing divergence ∂⋅j=(1/2)Tμμ(∂⋅δω) due to the traceless condition on Tμν. Since Tik is traceless, we have Tzz¯=Tz¯z=0 in the complex variables. These imply ∂z¯Tzz=∂zTz¯z¯=0 and there are only two non-vanishing components of the energy-momentum tensor T(z) = Tzz(z) = 1/4 (T11−2iT12−T22) and T¯(z¯)=Tz¯z¯(z¯)=1/4(T11+2iT12−T22). Moreover Tzz=(∂zτ)2 and Tzz¯=(∂z¯τ)2. In the line of CFT, we can introduce into the consideration the following constructions: since T(z) and T¯(z¯) are holomorphic functions then due to Laurent expansions
T(z)=∑nLnz−n−2,T¯(z¯)=∑nL¯nz¯−n−2,(5.6)
where the exponent −n−2 is chosen so that for the scale transformation z ↦ λ−1z under which T(z) ↦ λ2T(λ−1z) we have L−n ↦ λn L−n, and L¯−n↦λ¯nL¯−n. Therefore, the expressions (5.6) is finally inverted by the relations
Ln=12πi∮T(z)zn+1dz,L¯n=12πi∮T¯(z¯)z¯n+1dz¯.
Recall that Ln are defined on \{0} and consider
Tε=∮ε(z)T(z)dz,T¯ε¯=∮ε¯(z¯)T¯(z¯)dz,
where
ε(z)=−∑n=−∞∞εnzn+1,ε¯(z¯)=−∑n=−∞∞ε¯nzn+1
and εn(ε¯n) are infinitesimal small numbers. Their variations read [1]
This algebra is the Lie algebra of the central extension of the group of diffeomorphisms of the circle whose basic elements {Ln}, n ∈ Z. Here δk = 1 for k = 0 and δk = 0 for k ≠ 0. The quantity c is known as the central charge.
Indeed, integrating the last term of this integral by parts and combining with the first term we get the right-hand part of (5.12). The second term of (5.9) that is c12δn+mn(n2−1) can be presented as the following integral
∮dw2πi(c12n(n2−1)wn−2wm).(5.15)
Further transformations are based on using the well-known formula from the Complex Analysis
∂ζnf(ζ)=n!∮dw2πif(ζ)(ζ−z)n(5.16)
Since ∂z3zn+1|z=w=n(n2−1)wn−2 then applying (5.16), we get that (5.15) equals
∮dz2πi∮dw2πizn+1wm+1c2(z−w)4.(5.17)
Applying the same procedure to the first and the second terms of (5.14), we can see that this integral equals
∮dz2πi∮dw2πizn+1wm+1(2T(w)(z−w)2+∂T(w)z−w).(5.18)
Combining (5.17) and (5.18), we found that the integral
equals the right-hand side of (5.13). For the completeness, we need to add at the integral (5.19) a regular function R(z, w) on the variable z–w since this function are free of poles at z = w, hence R(z, w) does not contribute to the integral. Therefore comparing (5.19) with (5.13), it is derived that
T(z)T(w)=c2(z−w)4+2T(w)(z−w)2+∂wT(w)z−w+R(z,w).
This relationship is called the operator product expansion in CFT. The same assertion are hold for the T¯(z¯). Notice that the quantities c and c¯ coincide.
Corollary 5.1.
T(z)T(0)~c2z4,T¯(z¯)T¯(0)~c2z¯4asz,z¯→∞.(5.20)
We apply (5.20) to find asymptotic expansion the transversal correlation function BNN=u′2(t)¯g(zz¯) as |r→|→∞. For this, we use the following relationship
4∂zτ⋅∂z¯τ=u2(5.21)
and the equalities T(z) = Tzz = (∂zτ)2 and T¯(z¯)=Tz¯z¯=(∂zτ)2. Rewrite (5.21) in the form (∂zτ)2. (∂z¯τ)2=(1/16)(u2)2 and use the formulas (5.20). Then substituting instead of (u2)2 the quantity u′2(t)¯2g2(|r→|,t) in (5.20), we get the asymptotic expansion for BNN2(|r→|,t) in the form
TY - JOUR
AU - Vladimir N. Grebenev
AU - Martin Oberlack
PY - 2021
DA - 2021/01/06
TI - Homogeneous Isotropic Turbulence: Geometric and Isometry Properties of the 2-point Velocity Correlation Tensor
JO - Journal of Nonlinear Mathematical Physics
SP - 650
EP - 672
VL - 25
IS - 4
SN - 1776-0852
UR - https://doi.org/10.1080/14029251.2018.1503447
DO - 10.1080/14029251.2018.1503447
ID - Grebenev2021
ER -