
Observer based robust neuro-adaptive control of non-square MIMO nonlinear systems with unknown dynamics
- DOI
- 10.2991/ijcis.2017.10.1.3How to use a DOI?
- Keywords
- Non-square systems; Adaptive control; Observer; Neural network; Lyapunov stability
- Abstract
This paper addresses a robust adaptive control problem of non-square nonlinear systems with unmeasurable states. The systems are assumed to be multi-input/multi-output subject to dynamical uncertainties and external disturbances. The approach is studied for two cases, i.e., underactuated and over-actuated nonlinear systems. The new observer does not need to satisfy the SPR conditions. Moreover, a constant full-rank matrix with an adaptive gain is used to approximate the unknown gain matrix. Therefore, the proposed controller’s structure simplifies its implementation. The unknown nonlinearity is estimated neural networks. Stability of the closed-loop system is proved using Lyapunov analysis. The feasibility of the proposed approach is validated by simulation examples.
- Copyright
- © 2017, the Authors. Published by Atlantis Press.
- Open Access
- This is an open access article under the CC BY-NC license (http://creativecommons.org/licences/by-nc/4.0/).
1. Introduction
In practice, many of physical systems are nonlinear multi-input/multi-output (MIMO) systems. Because of coupling between inputs and outputs, control of MIMO systems becomes a more complicated problem. One of the most important classes of nonlinear systems is high-order affine systems described as follows
According to the literature review, the proposed methods for control of nonlinear systems of equation (1) have employed two approximators such as NNs or fuzzy models to estimate unknown nonlinearities f(x) and g(x). Therefore, the number of adjustable parameters were increased considerably and resulted in complexity of the controller structure and increasing computational cost.
On the other hand, in many control problems, all the state variables are not available for direct measurement. In recent years, the design of adaptive control based on observer for uncertain nonlinear SISO systems has been developed broadly, e.g. see Refs. 19–25 and the references therein. While the problem is still a challenging task for unknown nonlinear MIMO systems. In Ref. 26, a neuro-sliding mode method combined to a state observer was introduced to control the system (1). In Ref. 27, using the strictly positive real (SPR) conditions on the estimation error dynamics, an observer-based adaptive fuzzy control was designed for nonlinear MIMO systems with constant input gain. In Ref. 28, an adaptive fuzzy robust controller was proposed for unknown systems of the equation (1) and a state observer was designed by using the SPR conditions. In order to satisfy the SPR conditions, a low-pass filter must be applied to augment observation error dynamics which results in the filtering of the fuzzy or NN basis functions and the other terms of the controller. Thus, these methods increase dynamic order of the controller or the observer considerably. Du and Qu proposed29 an observer-based indirect adaptive controller for time delayed version of the system (1) but stability analysis was not presented. In Ref. 30, a high gain disturbance observer-based control was suggested for nonlinear affine systems with known dynamics. In Ref. 31, an observer-based adaptive fuzzy sliding mode control was designed for the system (1). But for the observer implementation, it is necessary all the states to be available for measurement. Then, the controller proposed in Ref. 31 is not realizable. The schemes proposed in Refs. 26–31 have considered the square nonlinear system.
In this paper, an observer based robust neuro-adaptive control method is proposed for non-square nonlinear systems of the equation (1) with unknown nonlinearities and subject to uncertain external disturbances. Instead of the gain matrix estimation by a NN, a constant full-rank matrix with an adaptive gain is employed in the control law which leads to decrease adjustable parameters. Therefore, the proposed method includes only one NN for estimation of the unknown nonlinearities. Furthermore, to avoid the use of the SPR conditions, the output error is filtered and the state variables of the filter are used to design the underlying update laws. Thus, these new contributions result in to simplification of the controller structure and its implementation in practical applications.
The proposed method is investigated for two possible cases of non-square nonlinear systems, i.e. underactuated and over-actuated systems. On the other hand, the assumptions like bound restriction on the gain matrix of the system or being diagonal in Ref. 1 and Hurwitz assumption in Ref. 10 are relaxed here. Therefore, the proposed method covers extensive physical systems and is also applicable to the square nonlinear systems. A radial basis function neural network (RBFNN) is employed to estimate the unknown nonlinearities. By using the Lyapunov analysis, stability of the closed-loop system and boundness of all signals are achieved. Finally, two simulations are performed to verify effectiveness of the proposed control method and its robustness against uncertainties. The remainder of the paper is organized as follows. Problem statement including derivation of the error dynamics for tracking problem is introduced in section 2. In Section 3, first, the controller design is discussed and then an observer is introduced. Section 4 presents the stability analysis using the Lyapunov method to guarantee the performance and the stability of the designed robust adaptive controller based on observer. Simulation results are given in section 5. Finally section 6 concludes the paper.
2. Problem Formulation
Consider high order nonlinear MIMO systems described by
The tracking error is defined as
Remark 1.
In this paper, 0n ∈ Rn and In are n-dimensional zero and identity matrices, respectively. ⊗ denotes Kronecker product.
Remark 2.
By introducing E = (eT, ėT,…, e(n−1)T)T ∈ Rnm, error dynamics is defined as
3. Controller and observer design
The control objective here is to find some appropriate controller such that for any initial conditions, the system states follow desired trajectory. In control engineering, NNs and fuzzy systems are usually employed as the function approximator to emulate the unknown functions9, 33–35. The radial basis function neural network (RBFNN) has been shown to have universal approximation ability to approximate any smooth function on a compact set. Also, due to their “linear-in-the-weight” property, RBFNN is a good candidate for this purpose. Assume that the unknown nonlinearities f(x) in (1) can be approximated on a compact set Ω ∈ R by
The following adaptive rule is proposed to update the parameters
Since A0 and Ac are Hurwitz, there exist unique symmetric positive definite matrices P1 and P2 satisfying the Lyapunov matrix equations
4. Stability analysis
The following standard assumptions are required;
Assumptions 1.
Uncertain disturbance, w, and approximation error vector, ε, are bounded by constants wM and εM, i.e., ║w║ ≤ wM and ║ε║ ≤ εM.
Assumptions 2.
The state of the reference trajectory and its time-derivatives up to order n are given and bounded. Especially,
Assumptions 3.
Unknown ideal NN weight matrix and NN activation functions are bounded by ║W║ ≤ WM and ║Φ║ ≤ ΦM respectively.
Assumptions 4.
Strictly Hurwitz transfer function H(s) is bounded by ║H(s)║ ≤ HM.
Lemma 1.
If Assumptions 1 to 4 are satisfied, then there exist positive constants c1, c2, c3, c4, c5, c6, c7 and cM such as
Proof. 1.
From Assumptions 1 to 3 and ║tanh(.)║ = 1, ║u1║ is given by
Taking into account Assumption 1 to 4, and the boundedness of us and input gain matrix, one obtains
3. Using the similar procedures of proof 2, one easily obtains (23) where
First stability analysis is presented for underactuated systems and the results will be easily applied to the over-actuated counterpart.
Theorem 1.
Consider the underactuated system (1) under Assumptions 1–3 and the observer (16). Then, the proposed neuro-adaptive controller (9-a) with the updating rules (14)–(15), guarantees the tracking error converges to a neighborhood of zero and all the signals of the closed-loop system are uniformly ultimately bounded.
Proof.
Consider the following Lyapunov function
Taking the time derivative of V1 along the error dynamics (16)–(17)
Substituting Lyapunov matrix equation (19)–(20), using Lemma 1 and considering the fact that
Differentiating V2 along of solution (13) yields
Applying the property of the trace operator xTy = tr{yxT} ∀ x, y ∈ Rm to (31) yields
Adding
Summation of (30) and (34) gives upper bounded of the derivative of the Lyapunov function candidate as following
Using the fact that
In order
The following condition will guarantee that
Following inequality results from property that ki > 0 (14) for i= 1,…,4
Now the stability analysis is presented for over-actuated nonlinear system (1).
Theorem 2.
Consider the over-actuated nonlinear system (1) under Assumptions 1–3 and the observer (16). Then, the proposed neuro-adaptive controller (9-b) with the updating rules (14)–(15), guarantees the tracking error converges to a neighborhood of zero and all the signals of the closed-loop system are uniformly ultimately bounded.
Proof.
By replacing
Remark 4.
If m = p, the system of equation (1) represents a square system then by introducing control law
5. Simulations
Example 1:
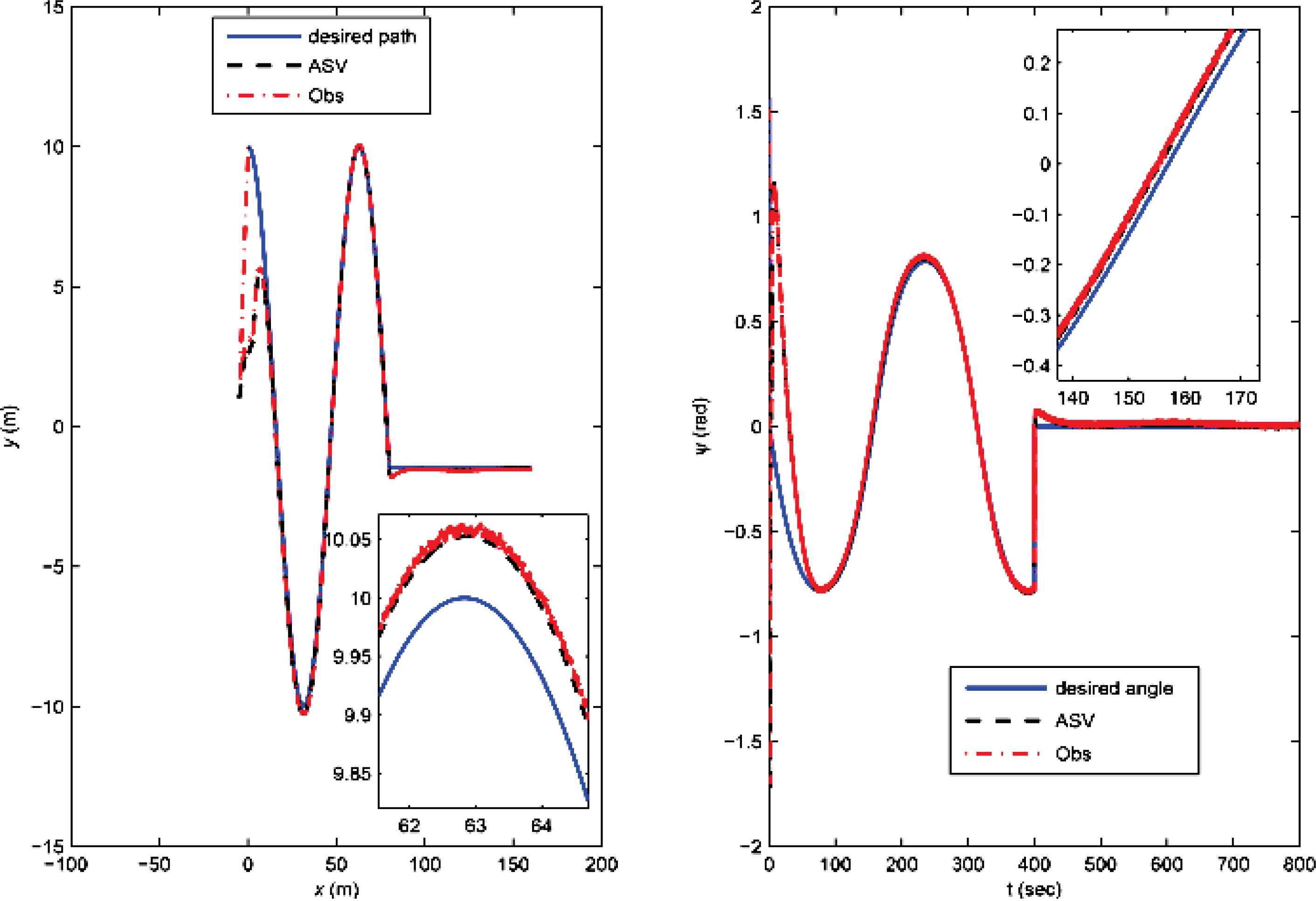
In this example, the proposed controller is applied to an underactuated nonlinear ASV with 3 degrees-of-freedom (3DOF) model. The ASV dynamics is highly nonlinear and is represented as following39;
A white noise is also added to the measured signals using randn(.) to simulate real sensors. The design parameters are β = 30, ρ = 10, kw = 0.01, kα = 0.25, η1 = 1, η2 = 0.1. The centers of RBFNN, ζ, are evenly spaced in [−2,2]×[−0.5,0.5]×[−0.3,0.3]×[−0.53,0.53] with spreads σ = 0.34 and number of neurons at each node are nr=16. Finally, the column full-rank gain matrix G1 is chosen as
The weights of RBFNN and the adaptive gain are initialized at zero. Figure 1 to Figure 5 illustrate the results of employing the proposed controller (9-a) for the ASV. The movement of ASV in the plane and its heading tracking curve together with estimated states are shown in Figure 1. Figure 2 demonstrates the applied control forces. Observation errors are shown in Figure 3 to Figure 5. It is seen from Figure 1 and Figure 3 that the ASV has realized the tracking task. Figure 4 to Figure 5 illustrate good performance of the designed observer (16) for estimating the unmeasured states. The simulation results imply the effectiveness of the proposed method for control of highly nonlinear systems with unknown dynamics and unmeasured states and its robustness against estimation error, environment disturbances and measurement noises.
Trajectory tracking of ASV in horizontal plane. Control inputs of ASV during trajectory tracking. Tracking errors of ASV. The difference between η and its estimation
The difference between




Example 2:
The proposed control method in this study is compared with that of Ref. 40 for an underactuated surface vehicle (USV) whose dynamics is given by40
Similar to Ref. 40, the initial condition of the robot is η(0) = ν = 0 and the reference trajectory to be tracked is a straight line trajectory. The design parameters are β = 0.75, ρ = 2, kw = 0.1, kα = 0.25, η1 = 1, η2 = 0.1. The Parameters of RBFNN are selected same as Example 1. Finally, the column full-rank gain matrix G1 is chosen as
The simulation results are shown in Figure 6 and Figure As shown in Figure 6, the proposed controller can provide faster convergence and higher tracking performance than the controller of Ref. 40. Figure 7 illustrates good performance of the designed observer (16) for estimating the unmeasured states.
Trajectory tracking of ASV in horizontal plane. Actual states and estimation of observer

6. Conclusion
This paper has addressed a robust adaptive control based on observer for MIMO non-square nonlinear systems with unknown dynamics. The proposed method is studied for two possible cases, i.e., underactuated and fully-actuated ones. A constant full-rank matrix with an adaptive gain is employed in the control law. Thus, contrast to the majority of the available results which employed two neural networks, the new controller utilizes only one neural network. Furthermore, by filtering the output error, the state variables of the filter are applied to design the underlying update laws. Therefore, the observer does not need to satisfy the SPR conditions. These new contributions result in to simplification of the controller structure and its implementation in practical applications. The Lyapunov analysis is applied to guarantee the closed-loop system stability and convergence of unknown parameters. The simulation results confirm the validity of the proposed controller and its robustness against estimation error, environment disturbances and measurement noises.
References
Cite this article
TY - JOUR AU - Hassan Ghiti Sarand AU - Bahram Karimi PY - 2017 DA - 2017/01/01 TI - Observer based robust neuro-adaptive control of non-square MIMO nonlinear systems with unknown dynamics JO - International Journal of Computational Intelligence Systems SP - 23 EP - 33 VL - 10 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.2017.10.1.3 DO - 10.2991/ijcis.2017.10.1.3 ID - Sarand2017 ER -