
Stability and Stabilization Condition for T-S Fuzzy Systems with Time-Delay under Imperfect Premise Matching via an Integral Inequality
 , Dawei Wang2, *, , Xiao-Zhi Gao3
, Dawei Wang2, *, , Xiao-Zhi Gao3- DOI
- 10.2991/ijcis.d.201112.001How to use a DOI?
- Keywords
- T-S fuzzy systems; Time-delay; Integral inequality; Lyapunov-Krasovskii function (LKF); Imperfect premise matching
- Abstract
This paper focuses on the stability and stabilization analysis for the T-S fuzzy systems with time-delay under imperfect premise matching, in which the number of fuzzy rules and membership functions employed for the fuzzy model and fuzzy controller are different. By introducing an augmented Lyapunov-Krasovskii function containing a triple-integral term, a less conservative membership-dependent stability condition is proposed via an integral inequality. Moreover, a new design approach under imperfect premise matching is developed in the paper. Four numerical examples are given to illustrate the advantages of our approaches. A practical benchmark problem namely continuous Stirred Tank Reactor (CSTR) is discussed in details in order to further verify their effectiveness.
- Copyright
- © 2021 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
As we know that the fuzzy model proposed by Takagi and Sugeno can effectively represent nonlinear dynamic systems [1], and some efforts on T-S fuzzy model have been done [2,3]. For example, a reinforcement fuzzy learning scheme for robots playing a different game in [4], and [5] proposes a fuzzy logic control algorithm (FLCA) to stabilize the Rössler chaotic dynamical system. Microscopic simulation and fuzzy rule interpolation is applied to the traffic lights cycles and green period ratios in [6]. Moreover, a model for picture fuzzy Dombi aggregation operators is developed in [7] to solve multiple attribute decision-making methods in an updated way. On the other hand, time-delays exist in numerous dynamical systems including biology systems, mechanics, economics, chemical systems, network systems, etc. Generally, time-delays often lead to instability and poor performances. Therefore, it is significant to take time-delays into account in the practical analysis and synthesis problems [8–10]. In the literature, two basic techniques have been widely utilized, i.e., delay-independent [11] and delay-dependent approaches. The latter makes use of the information on the length of the delays, which can yields less conservative results than the former one. As a matter of fact, most delay-dependent stability and stabilization results are derived via the Lyapunov-Krasovskii function (LKF) method [12–14]. However, stability criteria based on the LKF method is sufficient and unnecessary, which leads to the results conservative. Therefore, developing less conservative criteria, i.e., enlarging the feasible region of stability criteria and obtaining the maximum delay bounds of time-delays, has become a popular research issue [15–19]. There are two major ways to reduce conservativeness. One is constructing a proper LKF, and the other is applying suitable bounding techniques so that the derivative of the constructed LKF can be estimated. During the recent years, different LKF techniques have been extensively applied, such as piecewise [20,21], fuzzy [22], and line integral [23]. If more information related to delay and cross-term relationship is taken into consideration, less conservative results can be obtained by using the delay-partitioning LKF [24,25], refined LKF [26,27], and delay-product-type LKF [28–30]. With multiple integral terms, the conservatism of the obtained results is further lessened [31–34]. In terms of bounding techniques, the free-weighting matrix and integral inequality approaches have been used. When more free matrices are introduced in the stability conditions, the corresponding computational complexity is also increased in the free-weighting matrix approach [35]. Therefore, Jensen's inequality is applied to estimate the single integral terms without using any slack matrices [36]. Wirtinger's inequality providing more accurate bounding results is proposed in [37]. In order to obtain better conservative results, some improved inequalities are studied, such as auxiliary function-based integral inequality [38] and free-matrix-based integral inequality [39]. Additionally, Bessel–Legendre inequality that is less conservative than Jensen's and Wirtinger's inequalities is developed in [40]. An extended Wirting's inequality [41] is further applied to the time-delay systems. In order to generate tighter lower bounds for the single integral terms, a new inequality is proposed so that more results on stability analysis for time-delay systems can be derived [42]. However, the above work only considers the single integral terms. Some multiple integral inequalities are introduced in [43–45]. For example, Wirtinger's double inequality is applied to handle the double integral terms in [46,47]. To reduce the estimation gap, a new double integral inequality is proposed in [48]. Most of the existing work on the stability and stabilization for the T-S fuzzy delayed systems is based on Parallel Distributed Compensation (PDC) scheme [1–38], in which both the fuzzy model and fuzzy controller share the same premise membership functions and number of fuzzy rules. However, the design flexibility of such a fuzzy controller is limited and its structure becomes unnecessary in some cases, thus resulting in a high implementation cost. To cope with these issues, design of under imperfect premise matching is studied [49], where the membership function of the fuzzy controller can be selected arbitrarily. Some efforts on developing less conservative stability criteria for this kind of systems have been made in order to enlarge the feasible region of stability criteria as well as acquire the maximum delay bounds. However, in [50–54], there are still two open questions: how to select the LKF and how to estimate the derivative of the constructed LKF. Motivated by coping with these two issues, we propose a new augmented LKF containing a triple-integral term in this paper. Moreover, we develop two novel improved integral inequalities, which can generate tighter lower bounds for
In this paper, we focus on the stability and stabilization issues for the T-S fuzzy systems with the time-delay under imperfect premise matching, in which the fuzzy model and fuzzy controller share different premise membership functions as well as different number of fuzzy rules. With an augmented LKF that contains a triple-integral term, a novel less conservative stability condition with the information of membership functions is proposed on the basis of improved integral inequalities. Moreover, a new design approach under imperfect premise matching is explored. The main contributions of our paper can be summarized as follows:
Some less conservative stability criteria are developed and studied so that a larger upper bound of delay can be obtained.
The proposed controller design method can not only enhance the design flexibility, but also reduce the implementation cost of the fuzzy controller.
The remainder of this paper is organized as follows: In Section 2, the problem under consideration is first described in details. Novel stability and stabilization conditions under imperfect premise matching are next proposed in Section 3. A total of five numerical examples are used to illustrate the effectiveness and advantages of the proposed method in Section 4. Finally, Section 5 concludes this paper with some conclusions and remarks.
Notations: In this paper, matrices are assumed to have compatible dimensions.
2. SYSTEM DESCRIPTION AND MODELLING
2.1. Fuzzy Time-Delay Model
Consider the following nonlinear system with the state and distributed delays defined by the following T-S fuzzy delayed model. Let
Rule
2.2. Fuzzy Controller Under Imperfect Premise Matching
Different from the PDC design technique, a new fuzzy control law under imperfect premise matching is employed here to establish the state-feedback controller to stabilize the fuzzy time-delay systems in Eq. (2).
Rule
2.3. Close-Loop Fuzzy Control Systems
The closed-loop form of the nominal system is
Remark 1.
It can be discovered from Eq. (9) that the fuzzy time-delay model and fuzzy controller do not share the same membership functions that leads to imperfect premise matching. If we set
Lemma 1.
[42] For a positive-definite matrix
Lemma 2.
[48] For a positive-definite matrix
Lemma 3 (Finsler's Lemma [14]).
Given matrices
3. MAIN RESULTS
Theorem 1.
For given scalar
Proof.
Let us choose the following LKF candidate:
Differentiation of
Define
We have
From Lemma 1, there is
By Lemma 2, we get
The above inequalities are introduced to Eq. (16), and we have
From Eq. (9), the following equation holds
The above equation can be rewritten as follows:
For two arbitrary matrices with appropriate dimensions
Define
By introducing the above zero quantities to Eq. (22), we can obtain
Define
If
According to statements of (i) and (iii) of Lemma 3, if
Furthermore, the information of membership function is used to alleviate the conservativeness as in [53].
Remark 2.
It is apparent that the inequalities in Lemma 1 we introduce can produce tighter lower bounds for
Remark 3.
The triple-integral term
Remark 4.
A novel double integral inequality in Lemma 2 is introduced to deal with the time derivative of the triple-integral term
Remark 5.
In the proof of Theorem 1, the membership functions are considered in the inequalities, and an improved membership function information dependent stability criterion is presented, which will lessen the conservatism of the existing results based on the PDC scheme. Consequently, the stability conditions in Theorem 1 are more relax than the ones that are membership function independent.
Remark 6.
From Theorem 1, as the PDC scheme claims that the fuzzy model and fuzzy controller must share the same membership function, it is worthy to note that PDC-based stability analysis cannot handle the case when
Remark 7.
With the zero equality in Eq. (27) and the free matrices
As the controller in Theorem 1 is known, we will next investigate how to design the unmatching controller.
Theorem 2.
For a given scalar
Proof.
Pre and postmultiply both the diag
Thus, if Eq. (37) holds, the system Eq. (9) is asymptotically stable with the feedback controller, which is defined as
Remark 8.
Different from the general PDC technique, the design method under the imperfect premise matching is much more flexible, since the number of the fuzzy rules and membership functions of fuzzy controller can be chosen different from those of the fuzzy model. Therefore, certain simple and certain membership functions of the fuzzy controller might be employed, which can reduce the implementation cost.
Remark 9.
The matrices
4. NUMERICAL EXAMPLES
In this section, a total of five examples are introduced to illustrate the effectiveness and efficiency of the proposed method. The first example shows the improvement of stability conditions. The second example demonstrates the improvement of stabilization conditions of the new controller design approach. The efficiency of our controller design method is further validated in Example 3. The robustness of this scheme against the measurement noise is illustrated in Example 4. Finally, in Example 5, the continuous Stirred Tank Reactor (CSTR), a benchmark problem for nonlinear process control, is used to verify the validation of the proposed approach.
Example 1.
Consider the two rules of the T-S fuzzy system [15] in the form of (9) with
For comparison with the results reported in the existing literature, the maximum values of time-delay
| Paper | |
|---|---|
| [16] | 0.65 |
| [17] | 1.25 |
| [19] | 3.37 |
| [15] | 4.71 |
| [18] | 5.58 |
| [47] | 5.73 |
| Theorem 1 | 5.92 |
Maximum value of
From Table 1, we can see that larger time-delays are obtained based on the less conservativeness of our method.
Example 2.
Consider the two rules of the T-S fuzzy system [15] in the form of (9) with the following parameters:
The membership functions are chosen as [49]:
By Theorem 2, the fuzzy controller with different membership functions from those of the fuzzy model can be designed as
Under the imperfect premise matching, some simple membership functions can be chosen as
The maximum value of time-delay is obtained, and the comparisons with the other results are provided in Table 2. Note that the controller gains are given as follows:
| Paper | |
|---|---|
| [8] | 0.1524 |
| [19] | 0.2664 |
| [9] | 0.6611 |
| [15] | 0.8420 |
| [10] | 1.0947 |
| [47] | 1.1403 |
| Theorem 2 | 1.3241 |
Maximum value of
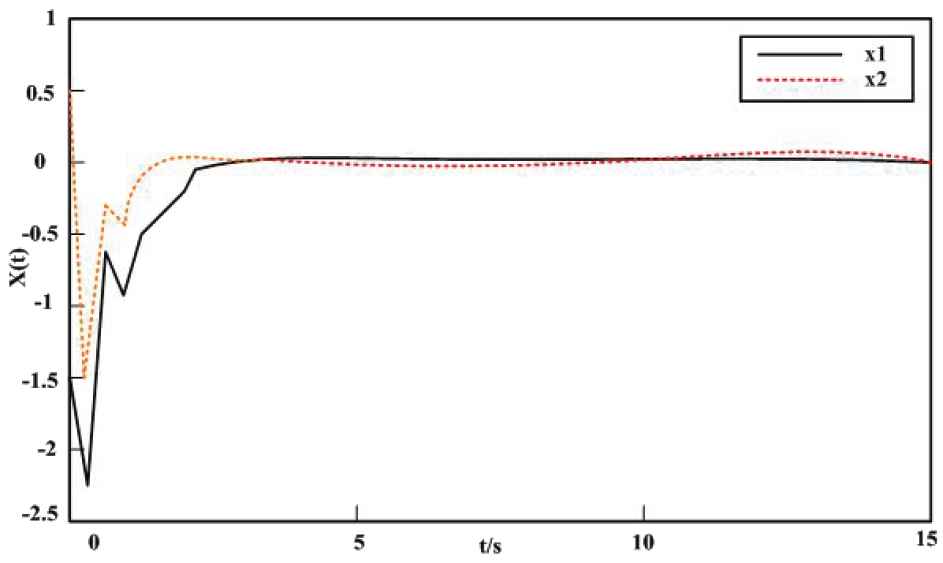
With the initial

State response of the closed-loop system.
From Table 2, it is apparent that our technique can lead to larger time-delays, and the stable area can be expanded via the unmatching state-feedback controller design scheme.
Remark 10.
In Example 2, our method offers less conservative results in the sense of allowing longer time-delay. Moreover, compared with the results based on the PDC, where the fuzzy controller must have the same membership functions as those of the fuzzy model, our fuzzy controller shares much simpler membership functions, which leads a low implementation cost and enhances design flexibility.
Remark 11.
In Example 2, since the parameter
Example 3.
Consider the three rules of T-S fuzzy system [53] in the form of (9) with the following parameters:
Here,
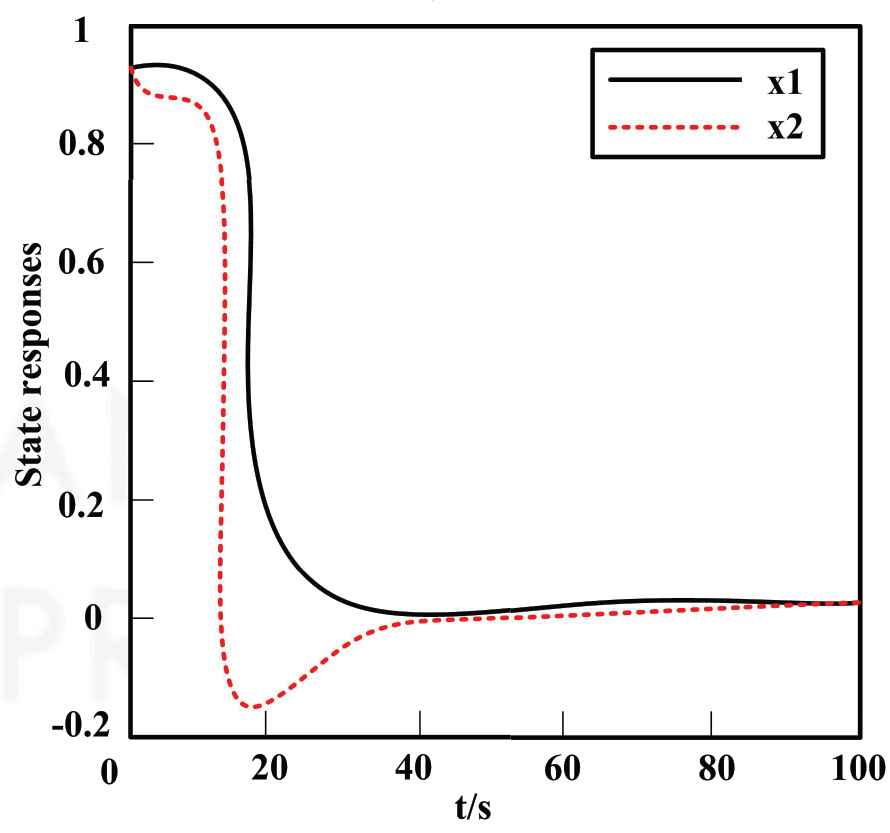
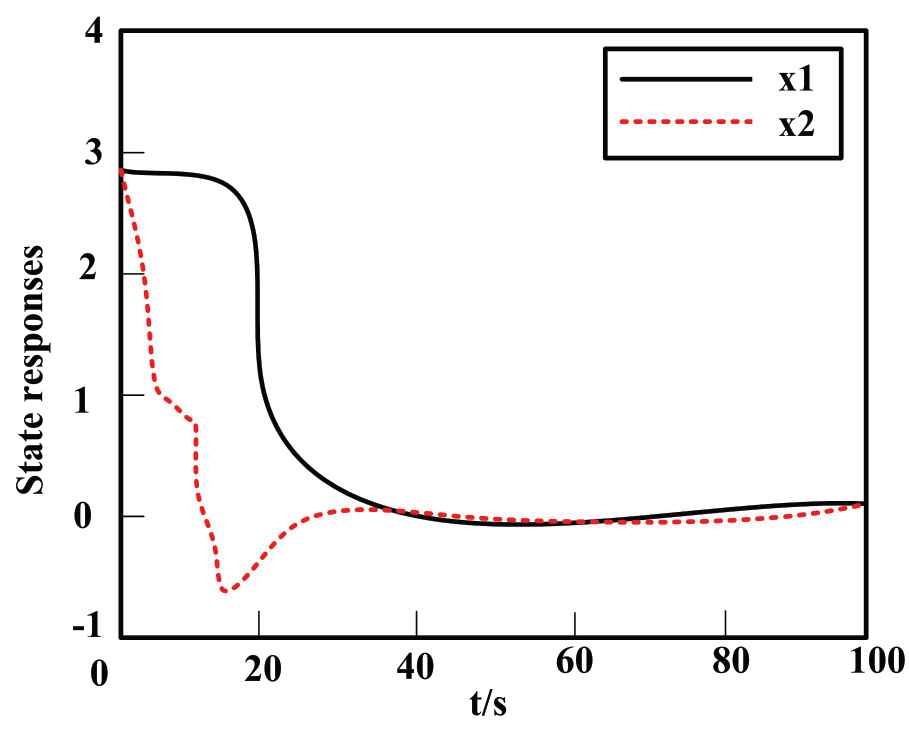
The states response of the closed-loop system under the initial condition

State response of the closed-loop system.

State response of the closed-loop system [53].
Remark 12.
As the number of fuzzy rules and the membership functions employed for the polynomial fuzzy model and polynomial fuzzy controller are different, we emphasize that many existing stabilization cannot be directly applied in this case.
Remark 13.
Compared with the unmatching design method [53] in case of the same time-delay, our approach can stabilize the system faster.
Example 4.
Consider the following system with measurement noise:
The membership functions are the same as in (44). From Theorem 2, the membership functions of the fuzzy controller are chosen as in (45).
Using the MATLAB LMIs toolbox, we can get the following controller gains:
Based on the Monte Carlo simulation, the state response along the Gaussian noise path of the closed-loop system and the control input under
State response of the closed-loop system under white Gaussian noise.

Control input of the closed-loop system.
Part of the simulation codes used in the above examples can be downloaded from the following link: https://www.jianguoyun.com/p/DRTzbyAQkb-_CBj1iJ8D
Example 5.
To further demonstrate the effectiveness of the proposed method, in this example, we consider the CSTR benchmark problem, which has a lot of interesting features characterized by highly nonlinear behaviors [55]. The following dimensionless model of the CSTR is used [56]:
Rule 1: IF
Rule 2: IF
Rule 3: IF
The membership functions are chosen the same as in Eq. (44). Therefore, we have
Under the imperfect premise matching, the state-feedback fuzzy controller can be designed as follows:
Based on Theorem 2, the controller gains are obtained:
Under the initial conditions
Systems responses under
Systems responses under

Systems responses under
5. CONCLUSIONS
In this paper, the stability and stabilization issues for the T-S fuzzy systems with time-delay under imperfect premise matching are investigated. A less conservative and improved membership functions dependent stability criterion has been derived by introducing an improved integral inequality, which owns tighter lower bounds than Wirting's inequality. Additionally, a new design technique under imperfect premise matching is developed, which can significantly improve the design flexibility by arbitrarily selecting the fuzzy rules and fuzzy membership functions. A total of five examples are used to illustrate the conservativeness and effectiveness of our novel methods. We emphasize that the proposed techniques are valid only under the circumstance of the control systems without uncertainty. Therefore, how to extend them to the uncertain T-S fuzzy time-delay systems and obtain the corresponding robust stability condition will be an important topic in our future work.
CONFLICTS OF INTEREST
The authors declare that they have no conflicts of interest to report regarding the present study.
AUTHORS' CONTRIBUTIONS
Z.Z. and W.W. proposed the theoretical analysis; Z.Z. conducted the simulations and wrote the paper. X. G. polished the language of the paper.
Funding Statement
This work was supported by projects (51805008, 51875113) of the National Natural Science Foundation of China (NSFC) and Project (JJKH20190644KJ, JJKH20190639KJ) of the Scientific Research of Jilin Provincial Department of Education.
ACKNOWLEDGMENTS
The authors would like to thank to the anonymous reviewers and editor for their insightful comments.
REFERENCES
Cite this article
TY - JOUR AU - Zejian Zhang AU - Dawei Wang AU - Xiao-Zhi Gao PY - 2020 DA - 2020/11/18 TI - Stability and Stabilization Condition for T-S Fuzzy Systems with Time-Delay under Imperfect Premise Matching via an Integral Inequality JO - International Journal of Computational Intelligence Systems SP - 11 EP - 22 VL - 14 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.201112.001 DO - 10.2991/ijcis.d.201112.001 ID - Zhang2020 ER -